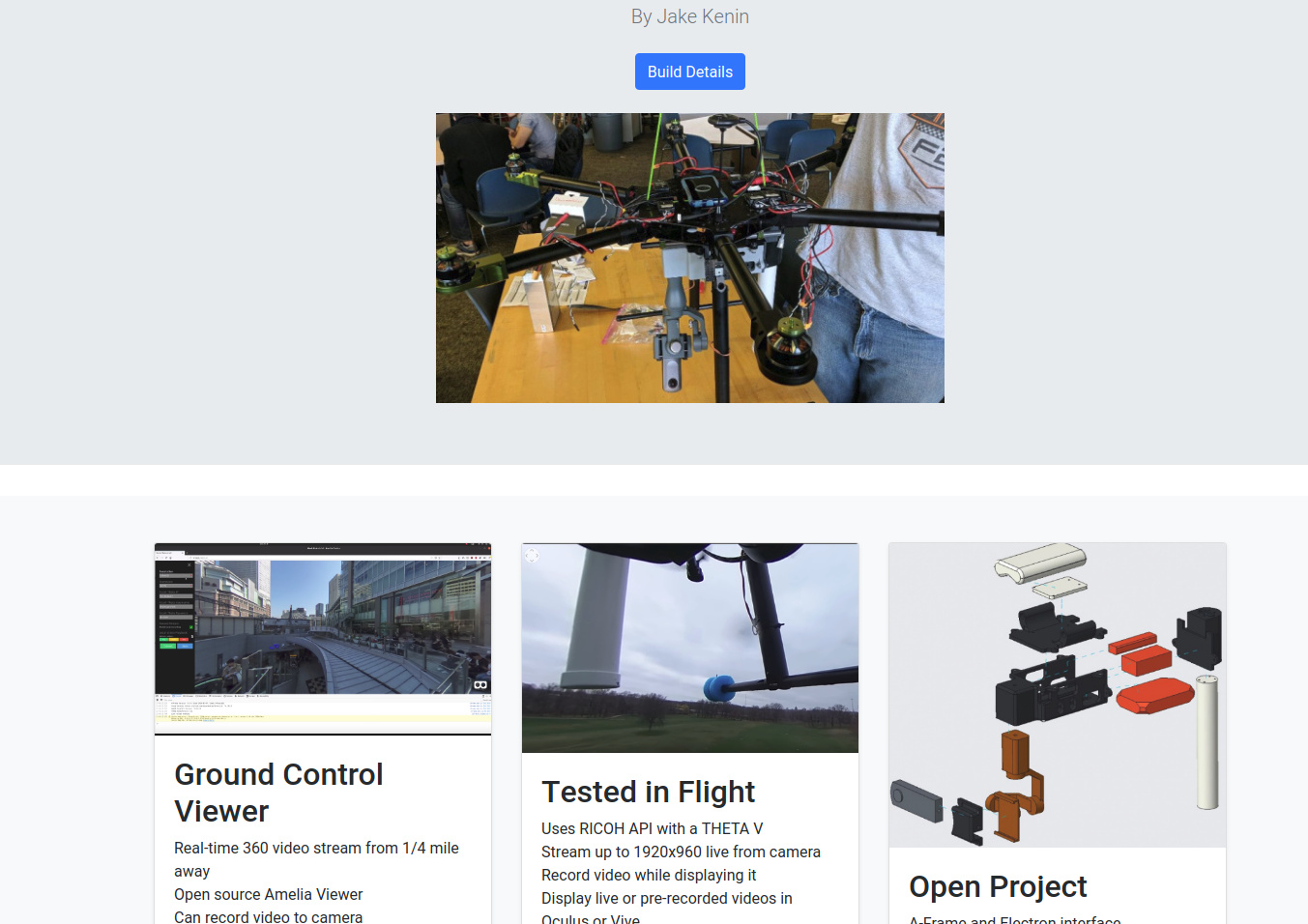
Working project of latency at 200ms lag by @Jake_Kenin
https://ideas.theta360.guide/blog/award201905/
Other approaches
Such you read through Jake’s thread first as it discusses the latency issue and different techniques to get around it.
I have not tried this, but you can experiment with the Camera API to get direct access to the Android OS commands for the camera.
https://api.ricoh/docs/theta-plugin-reference/camera-api/
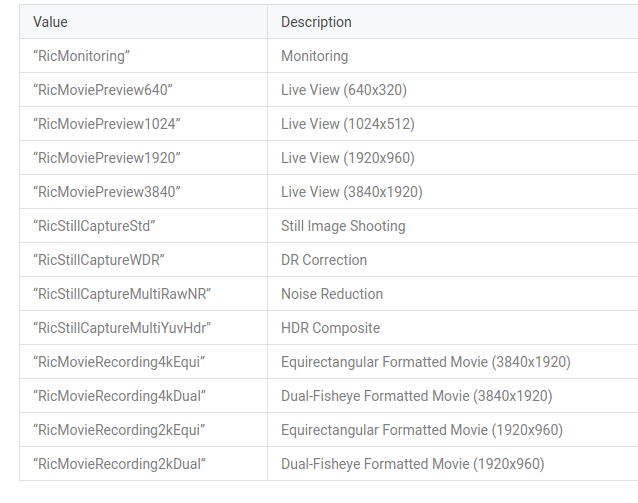
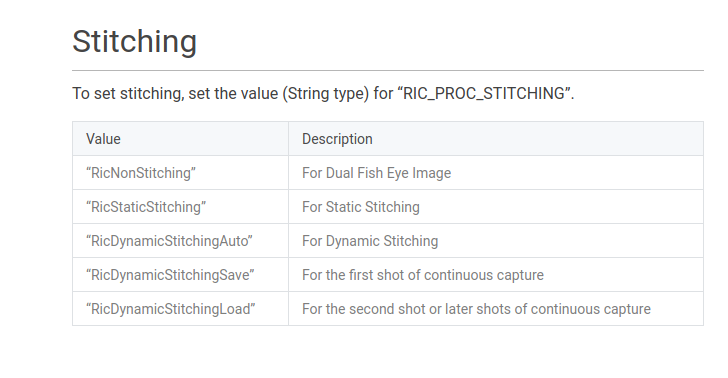
I do not think you can turn off stitching for Live View, but I have not tried.
You can use this GitHub repo as a base:
Note that even when the RICOH THETA is connected directly to Unity with a USB cable, I am getting latency of at least 0.4 seconds on Windows 10 with the USB driver supplied by RICOH with 4K video stream.
You may have lower latency with RTSP