Hi everyone,
I am trying to obtain pose matrix (rotation + translation):
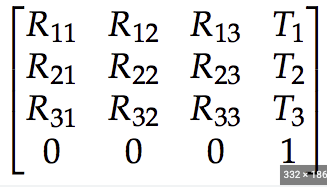
using the accelerometer and gyro data which I’m able to obtain:
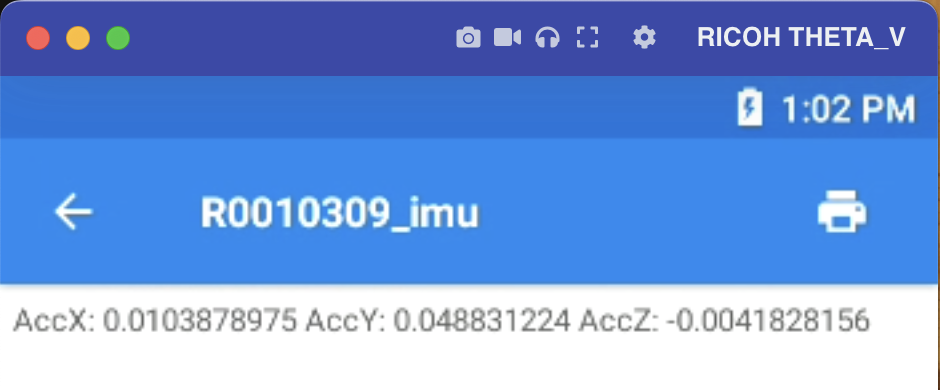
Anyone knows how to convert into pose matrix?
Hi everyone,
I am trying to obtain pose matrix (rotation + translation):
using the accelerometer and gyro data which I’m able to obtain:
Anyone knows how to convert into pose matrix?
You may find this type of project interesting.
https://twitter.com/thetaplugin/status/1235013945255059457
some information on sensor data, but nothing about pose.
Thanks a lot @craig, I found the latter two pretty useful as I need to estimate the pose of theta itself.
Btw have you ever heard of ARCore? I saw an project running on phones that can track Android smartphone’s pose. (GitHub - rfbr/IMU_and_pose_Android_Recorder)
However I couldn’t compile the code due to a bug that I could solve at the moment.
“Cause: com/android/tools/idea/gradle/run/OutputBuildAction has been compiled by a more recent version of the Java Runtime (class file version 55.0), this version of the Java Runtime only recognizes class file versions up to 52.0”
I then go ahead to try the ARCore example app (hello_ar_java) in (Krótkie wprowadzenie do Androida | ARCore | Google Developers) to see if I can run ARCore. But still couldn’t run it due to this issue:
Do you know if it’s possible to use ARCore in THETA V? If not then I’ll give up this approach.
Thanks
It may be possible to run ARCore inside the RICOH THETA. I have not tried it. The camera would need to be unlocked in developer mode, which is free.
You can apply for the partner program at the link below:
https://www8.webcas.net/db/pub/ricoh/thetaplugin/create/input
I do not think the THETA can support ARCore.
