I am trying to do some AprilTag detection with Ricoh Theta V. It is already streaming the stiched live video feed and openCV can handle frames and do processing on those frames.
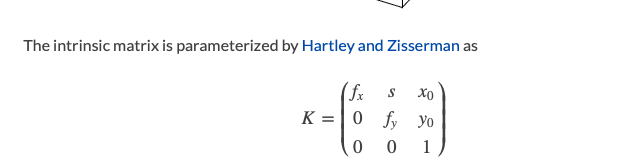
I wanted to find out how we can find the 3X3 camera intrinsics matrix for the Theta V via camera calibration.
I do not know what the 3x3 camera intrinsics matrix is. Can you provide more explanation? I read through this article, but still can’t figure out what you’re looking for.