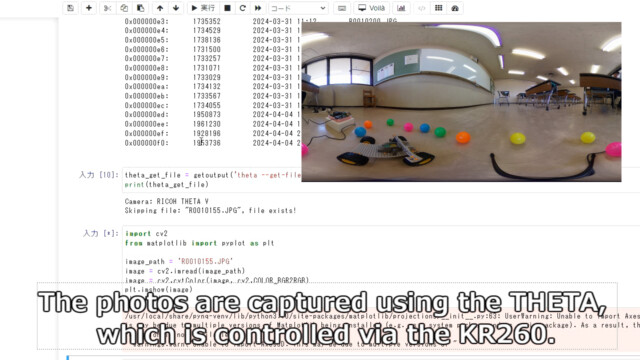
Oh, this is pretty interesting. I’m curious why Rviz2 would divide a 360 image into 4 sections. And other questions. I’m going to spend some more time looking into this.
@jcasman please try and contact the author. I don’t believe that he’s on .guide. If you translate his work (he gave us permission), and publish the work, consider asking him to join so we can gave him a community thanks award.
He indicated that he’s aware of .guide and uses the information.
Looking at the dmesg log, I was able to connect without any problems.
ubuntu@kria:~$ sudo su
root@kria:/home/ubuntu# dmesg |grep usb
[ 8.214013] usb 1-1.2: New USB device found, idVendor=05ca, idProduct=0368, bcdDevice= 1.00
[ 8.222380] usb 1-1.2: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[ 8.229697] usb 1-1.2: Product: RICOH THETA V
[ 8.234055] usb 1-1.2: Manufacturer: Ricoh Company, Ltd.
[ 8.239367] usb 1-1.2: SerialNumber: 00119628
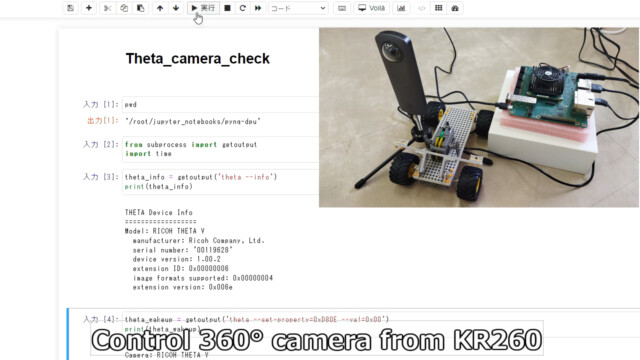
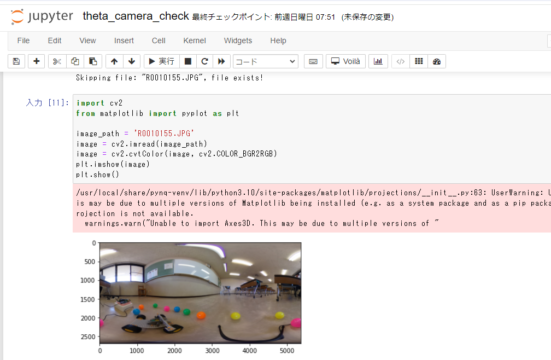
I’ll follow the same steps as described on GitHub, but I’m just going to try out the steps up to taking a photo.
First, wake up THETA from power saving mode. The camera’s LED lamp will light up blue.
theta_wakeup = getoutput('theta --set-property=0xD80E --val=0x00')
print(theta_wakeup)
Camera: RICOH THETA V
'UNKNOWN' is set to: 1
Changing property value to 0x00 [(null)] succeeded.
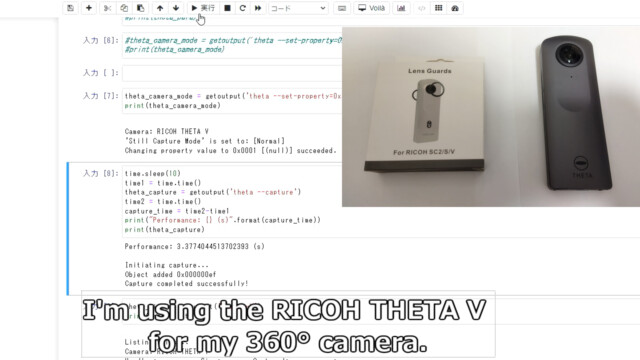
Switch to camera shooting mode. The camera mark will light up blue.
theta_camera_mode = getoutput('theta --set-property=0x5013 --val=0x0001')
print(theta_camera_mode)
Camera: RICOH THETA V
'Still Capture Mode' is set to: [Normal]
Changing property value to 0x0001 [(null)] succeeded.
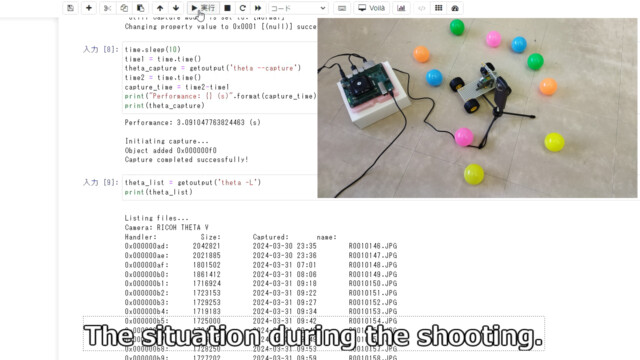
All you have to do is take a picture (capture).
I checked the shooting time of the 360° camera THETA V, and it was about 3 seconds.
@shegz101 Yes, it sure does. THETA has multiple APIs. You’ve worked with React Native development and the THETA WebAPI over Wi-Fi. This one is the USB API. It’s used with these kind of configurations, connecting a THETA to a small board computer, and doing live streaming. There are interesting robotics projects, but the USB API is also used in medical devices and for mapping interior spaces in the insurance, residential, and commercial real estate markets. And a lot more.
Added another reply, using the AI Chatbot in the forum:
The RICOH THETA supports multiple APIs to interact with different aspects of the camera. Here are the main APIs available:
THETA Web API v2.1: The most widely used API for RICOH THETA, allowing for various operations such as capturing images, video, and management commands. More details can be found here.
THETA USB API: Used for direct USB connections for controlling the camera and transferring data. It has its own set of operations and properties.
THETA Bluetooth API: This API is used for controlling the camera over Bluetooth for certain models, offering a limited set of operations compared to Wi-Fi.
THETA Plugin API: Allows developers to create plugins that run directly on the camera, providing a deeper level of interaction and control.
Each API serves different needs depending on how you interact with the RICOH THETA camera. For further details, the main documentation is available at RICOH THETA API Documentation.
Awesome. This is impressive! It seems to be just one API I have had to interact with, and I didn’t even know there were more interesting ones. Thank you.
 in ROS2 rviz2 and KR260.")








 from KR260")