Hi,
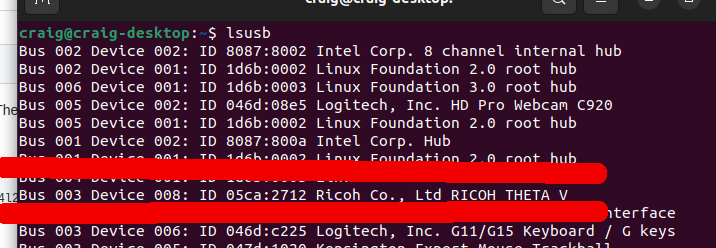
I have connected a theta z1 to the jetson via USB cable. Using instructions here
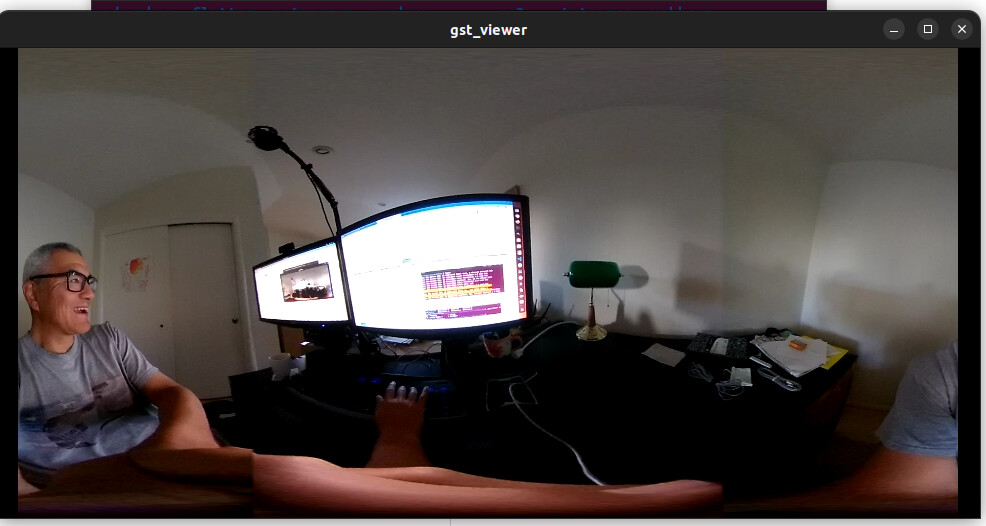
I can see the live stream. But I need to access the live stream through ROS. I tried with the gscam but I got the error “could not get gstreamer sample”. I need to see it through ROS because I aim to compress the stream using image-transport package and send it to unity.
I would appreciate it if you could help me with this issue.
thank you for your reply. I try that and I got the error " can’t open /dev/bus/usb/001/021: Not supported (-12)".
I also tried this
but this also gives me the error " gst_buffer_resize_range: assertion ‘bufmax >= bufoffs + offset + size’ failed.
I have no idea what happened when I installed the theta_driver that now the gst_viewer from libuvc_theta_sample also gives me error “can’t open THETA”.
I also tried usb_cam that doesn’t work neither. Ros deep learning nodes are also no good. Could you help me with any of these ways?