Hi all,
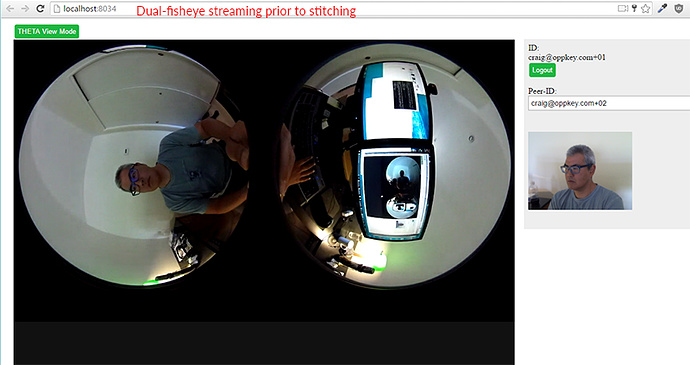
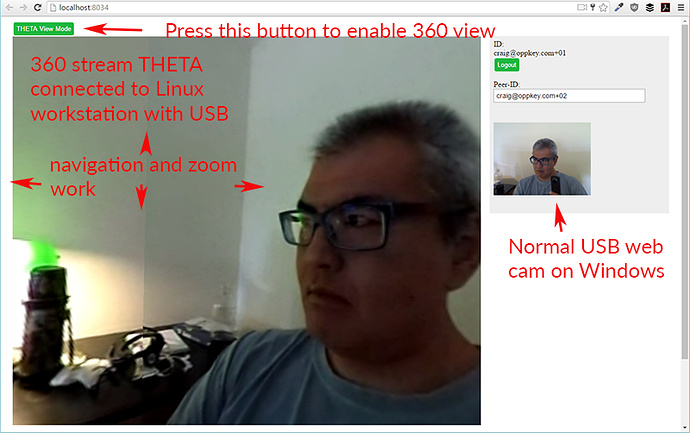
My friends and I have been working on a project which involves sending a ricoh theta s out into the field physically attached to a Mars rover analogue. The theta s is connected to raspberry pi on the rover and then the usb serial is communicated through a wifi connection. Our problem is occurring at the basestation. Our basestation is a linux laptop which is running all of the control code in various terminals. We want to attach the theta s live stream to a webcam texture mapped to a sphere in unity. The base station will then have a livestream from the rover that can be viewed in a unity application. We have demonstrated that the unity application works as intended on a 64bit Windows PC but despite all of our efforts and debugging we simply cannot get unity to attach the theta s to a webcam texture. We have debugged it by demonstrating that the inbuilt webcam and another usb webcam can be used with our unity application. The problem is thus isolated to the theta s.
When the unity application views the stream we don’t even get a black screen. We get a pure green screen with a bit of static interference on the edges. I am very confused as to where to go from now.
Can anybody help?