how can we perform live streaming using python code over usb
hi!
I really love live streaming, addicted to it, just wanted to be the first one who replies! ![]() Any way you will get details for sure, I’m more focused on live streaming wirelessly through WiFi routers or cellular network…
Any way you will get details for sure, I’m more focused on live streaming wirelessly through WiFi routers or cellular network…
How do you mean “over usb”? To live stream as webcam there are windows/linux drivers and in this scenario encoding happens on the other side on dekstop PC or pocket like Raspberry PI, Nvidia Jetson Nano, etc.
Which protocol would you like to use for the stream? RTMP, RTSP, else?
@Susantini Welcome to the theta360.guide community! There are quite a few projects and companies that do live streaming over USB. The FOX Sewer Rover co-founder @Hugues posted about using Python as a relay for the live stream feed. I think that was an early prototype and they have gone through many generations of development since then. But it may be a useful reference:
Fox Sewer Rover company here:
Register here and get detailed info.
RICOH THETA360.guide Independent developer community
Basic example in Python using OpenCV for processing.
import cv2
cap = cv2.VideoCapture(0)
# Check if the webcam is opened correctly
if not cap.isOpened():
raise IOError("Cannot open webcam")
while True:
ret, frame = cap.read()
frame = cv2.resize(frame, None, fx=0.25, fy=0.25, interpolation=cv2.INTER_AREA)
cv2.imshow('Input', frame)
c = cv2.waitKey(1)
if c == 27:
break
cap.release()
cv2.destroyAllWindows()
more complex example in Python.
import sys
import argparse
from tokenize import String
import cv2
import numpy as np
def parse_cli_args():
parser = argparse.ArgumentParser()
parser.add_argument("--video_device", dest="video_device",
help="Video device # of USB webcam (/dev/video?) [0]",
default=0, type=int)
parser.add_argument("--gsttheta", dest="gsttheta", help="nvdec, auto, none", default="none")
arguments = parser.parse_args()
return arguments
# Open an external usb camera /dev/videoX
def open_theta_device(device_number):
print(f"attempting to use v4l2loopback on /dev/video {device_number}")
return cv2.VideoCapture(device_number)
# https://github.com/nickel110/gstthetauvc
# example uses hardware acceleration
def open_gst_thetauvc_nvdec():
print("attempting hardware acceleration for NVIDIA GPU with gstthetauvc")
return cv2.VideoCapture("thetauvcsrc \
! queue \
! h264parse \
! nvdec \
! gldownload \
! queue \
! videoconvert n-threads=0 \
! video/x-raw,format=BGR \
! queue \
! appsink")
# without hardware acceleration
def open_gst_thetauvc_auto():
return cv2.VideoCapture("thetauvcsrc \
! decodebin \
! autovideoconvert \
! video/x-raw,format=BGRx \
! queue ! videoconvert \
! video/x-raw,format=BGR ! queue ! appsink")
def read_cam(video_capture):
if video_capture.isOpened():
windowName = "main_canny"
cv2.namedWindow(windowName, cv2.WINDOW_NORMAL)
cv2.resizeWindow(windowName,1280,720)
cv2.moveWindow(windowName,0,0)
cv2.setWindowTitle(windowName,"RICOH THETA OpenCV Python Demo")
showWindow=3 # Show all stages
showHelp = True
font = cv2.FONT_HERSHEY_PLAIN
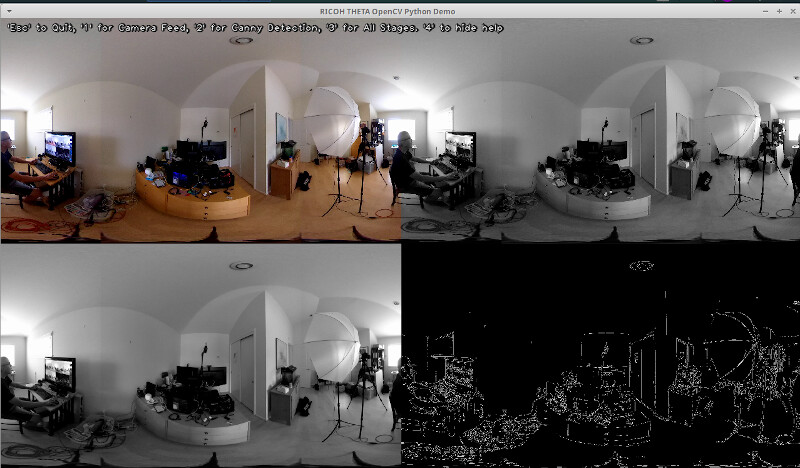
helpText="'Esc' to Quit, '1' for Camera Feed, '2' for Canny Detection, '3' for All Stages. '4' to hide help"
edgeThreshold=40
showFullScreen = False
while True:
if cv2.getWindowProperty(windowName, 0) < 0: # Check to see if the user closed the window
# This will fail if the user closed the window; Nasties get printed to the console
break;
ret_val, frame = video_capture.read();
hsv=cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur=cv2.GaussianBlur(hsv,(7,7),1.5)
edges=cv2.Canny(blur,0,edgeThreshold)
if showWindow == 3: # Need to show the 4 stages
# Composite the 2x2 window
# Feed from the camera is RGB, the others gray
# To composite, convert gray images to color.
# All images must be of the same type to display in a window
frameRs=cv2.resize(frame, (640,360))
hsvRs=cv2.resize(hsv,(640,360))
vidBuf = np.concatenate((frameRs, cv2.cvtColor(hsvRs,cv2.COLOR_GRAY2BGR)), axis=1)
blurRs=cv2.resize(blur,(640,360))
edgesRs=cv2.resize(edges,(640,360))
vidBuf1 = np.concatenate( (cv2.cvtColor(blurRs,cv2.COLOR_GRAY2BGR),cv2.cvtColor(edgesRs,cv2.COLOR_GRAY2BGR)), axis=1)
vidBuf = np.concatenate( (vidBuf, vidBuf1), axis=0)
if showWindow==1: # Show Camera Frame
displayBuf = frame
elif showWindow == 2: # Show Canny Edge Detection
displayBuf = edges
elif showWindow == 3: # Show All Stages
displayBuf = vidBuf
if showHelp == True:
cv2.putText(displayBuf, helpText, (11,20), font, 1.0, (32,32,32), 4, cv2.LINE_AA)
cv2.putText(displayBuf, helpText, (10,20), font, 1.0, (240,240,240), 1, cv2.LINE_AA)
cv2.imshow(windowName,displayBuf)
key=cv2.waitKey(10)
if key == 27: # Check for ESC key
cv2.destroyAllWindows()
break ;
elif key==49: # 1 key, show frame
cv2.setWindowTitle(windowName,"Camera Feed")
showWindow=1
elif key==50: # 2 key, show Canny
cv2.setWindowTitle(windowName,"Canny Edge Detection")
showWindow=2
elif key==51: # 3 key, show Stages
cv2.setWindowTitle(windowName,"Camera, Gray scale, Gaussian Blur, Canny Edge Detection")
showWindow=3
elif key==52: # 4 key, toggle help
showHelp = not showHelp
elif key==44: # , lower canny edge threshold
edgeThreshold=max(0,edgeThreshold-1)
print ('Canny Edge Threshold Maximum: ',edgeThreshold)
elif key==46: # , raise canny edge threshold
edgeThreshold=edgeThreshold+1
print ('Canny Edge Threshold Maximum: ', edgeThreshold)
elif key==74: # Toggle fullscreen; This is the F3 key on this particular keyboard
# Toggle full screen mode
if showFullScreen == False :
cv2.setWindowProperty(windowName, cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
else:
cv2.setWindowProperty(windowName, cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_NORMAL)
showFullScreen = not showFullScreen
else:
print ("camera open failed")
if __name__ == '__main__':
arguments = parse_cli_args()
print("Called with args:")
print(arguments)
print("OpenCV version: {}".format(cv2.__version__))
print("Device Number:",arguments.video_device)
if arguments.gsttheta=='nvdec':
video_capture=open_gst_thetauvc_nvdec()
elif arguments.gsttheta == 'auto':
video_capture=open_gst_thetauvc_auto()
else:
video_capture=open_theta_device(arguments.video_device)
read_cam(video_capture)
video_capture.release()
cv2.destroyAllWindows()
Suggest you run Python on Linux, either x86 or ARM work. However, due to GPU processing support, most people use NVIDIA Jetson for ARM.
This is the output of the Python program.
1 Like