Is your theta mounted as a filesystem? Try to manually unmount it. Interesting that ptpcam doesn’t work. I guess gohoto2 also doesn’t work?
Did you compile v42loopback from source? You have an error about tainted kernel.
see names of file with string libuvc using apt-cache
apt-cache search libuvc
libuvc-dev - cross-platform library for USB video devices - development files
libuvc-doc - cross-platform library for USB video devices - documentation
libuvc0 - cross-platform library for USB video devices
see if installed
dpkg -l libuvc-dev
dpkg-query: no packages found matching libuvc-dev
dpkg -l libuvc0
dpkg-query: no packages found matching libuvc0
see names of files with apt list
apt list | grep libuvc
libuvc-dev/jammy 0.0.6-1.1 amd64
libuvc-doc/jammy,jammy 0.0.6-1.1 all
libuvc0/jammy 0.0.6-1.1 amd64
see installed packages with apt list --installed
apt list --installed | grep libuvc
unmount THETA as filesystem on NVIDIA Jetson
Environment
lesunhe (person with problem)
theta model: Z1
firmware: unknown
hardware platform: jetson model is NVIDIA jetson AGX orin (ARM)
OS: Ubuntu 20.04
craig tests (working on Jan 18, 2024)
theta model: Z1
firmware: 3.10.2
hardware platform: x86
OS: Ubuntu 22.04
Craig Summary
| test | result | comment |
|---|---|---|
| USB API with gphoto2 | success | needed to unmount camera |
| v4l2loopback | success | compiled from source. /dev/video2 on my system |
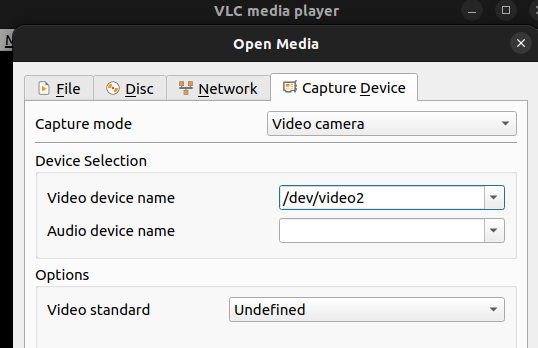
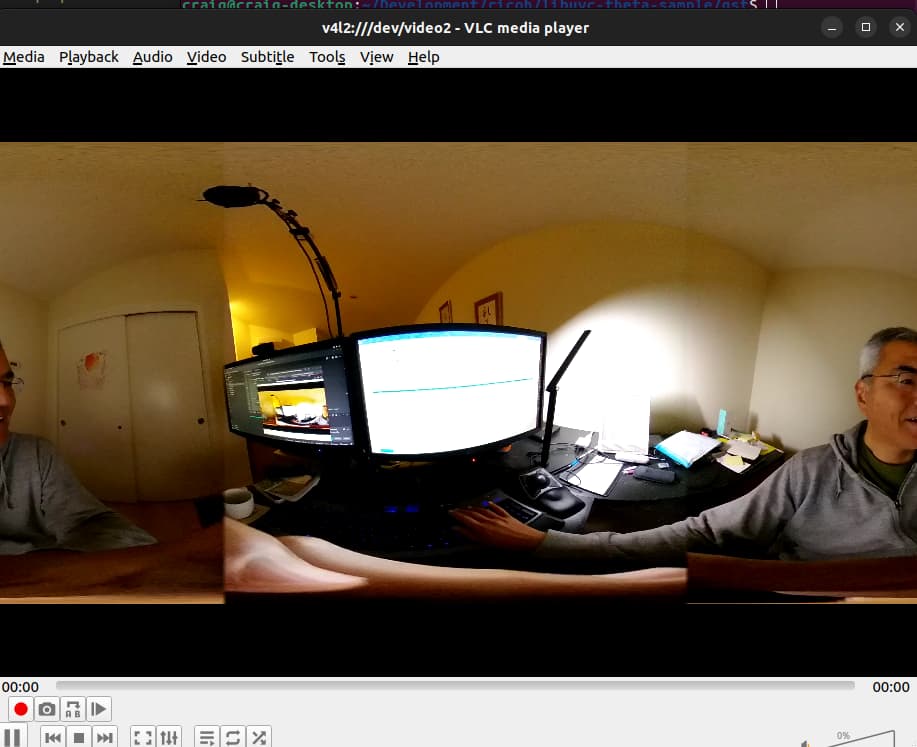
| vlc display | success | make sure v4l2loopback is correctly loaded into kernel prior to test |
| OpenCV | success | works stable for an hour. seems like it can keep working much longer |
gphoto2 --auto-detect
Model Port
----------------------------------------------------------
Ricoh Theta Z1 (MTP) usb:005,004
gphoto2 --summary
Camera summary:
Manufacturer: Ricoh Company, Ltd.
Model: RICOH THETA Z1
Version: 3.10.2
Serial Number: 10010104
Vendor Extension ID: 0x6 (1.10)
Vendor Extension Description:
Capture Formats:
Display Formats: Association/Directory, JPEG, MP4, DNG, Firmware
Supported MTP Object Properties:
Association/Directory/3001: dc01/StorageID dc02/ObjectFormat dc04/ObjectS
sudo modprobe v4l2loopback
lsmod |grep v4l2loopback
v4l2loopback 49152 0
videodev 364544 3 videobuf2_v4l2,v4l2loopback,uvcvideo
lsusb
...
Bus 005 Device 004: ID 05ca:036d Ricoh Co., Ltd RICOH THETA Z1
...
/gst_viewer -l
No : Product : Serial
0 : RICOH THETA Z1 : 10010104
./gst_loopback
start, hit any key to stop
testing with OpenCV
python ./canny_edge.py --video_device=2
Called with args:
Namespace(video_device=2, gsttheta='none')
OpenCV version: 4.9.0
Device Number: 2
attempting to use v4l2loopback on /dev/video 2
sample script
import sys
import argparse
from tokenize import String
import cv2
import numpy as np
def parse_cli_args():
parser = argparse.ArgumentParser()
parser.add_argument("--video_device", dest="video_device",
help="Video device # of USB webcam (/dev/video?) [0]",
default=0, type=int)
parser.add_argument("--gsttheta", dest="gsttheta", help="nvdec, auto, none", default="none")
arguments = parser.parse_args()
return arguments
# Open an external usb camera /dev/videoX
def open_theta_device(device_number):
print(f"attempting to use v4l2loopback on /dev/video {device_number}")
return cv2.VideoCapture(device_number)
# https://github.com/nickel110/gstthetauvc
# example uses hardware acceleration
def open_gst_thetauvc_nvdec():
print("attempting hardware acceleration for NVIDIA GPU with gstthetauvc")
return cv2.VideoCapture("thetauvcsrc \
! queue \
! h264parse \
! nvdec \
! gldownload \
! queue \
! videoconvert n-threads=0 \
! video/x-raw,format=BGR \
! queue \
! appsink")
# without hardware acceleration
def open_gst_thetauvc_auto():
return cv2.VideoCapture("thetauvcsrc \
! decodebin \
! autovideoconvert \
! video/x-raw,format=BGRx \
! queue ! videoconvert \
! video/x-raw,format=BGR ! queue ! appsink")
def read_cam(video_capture):
if video_capture.isOpened():
windowName = "main_canny"
cv2.namedWindow(windowName, cv2.WINDOW_NORMAL)
cv2.resizeWindow(windowName,1280,720)
cv2.moveWindow(windowName,0,0)
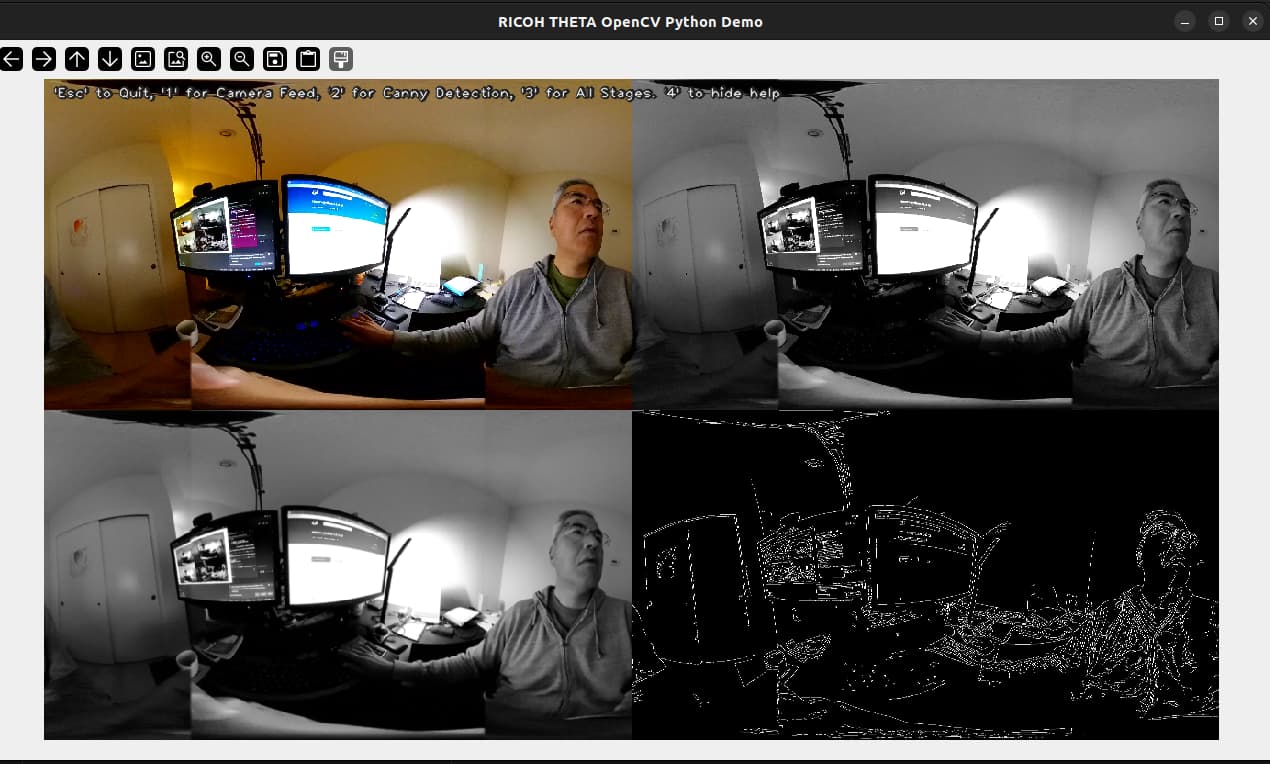
cv2.setWindowTitle(windowName,"RICOH THETA OpenCV Python Demo")
showWindow=3 # Show all stages
showHelp = True
font = cv2.FONT_HERSHEY_PLAIN
helpText="'Esc' to Quit, '1' for Camera Feed, '2' for Canny Detection, '3' for All Stages. '4' to hide help"
edgeThreshold=40
showFullScreen = False
while True:
if cv2.getWindowProperty(windowName, 0) < 0: # Check to see if the user closed the window
# This will fail if the user closed the window; Nasties get printed to the console
break;
ret_val, frame = video_capture.read();
hsv=cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur=cv2.GaussianBlur(hsv,(7,7),1.5)
edges=cv2.Canny(blur,0,edgeThreshold)
if showWindow == 3: # Need to show the 4 stages
# Composite the 2x2 window
# Feed from the camera is RGB, the others gray
# To composite, convert gray images to color.
# All images must be of the same type to display in a window
frameRs=cv2.resize(frame, (640,360))
hsvRs=cv2.resize(hsv,(640,360))
vidBuf = np.concatenate((frameRs, cv2.cvtColor(hsvRs,cv2.COLOR_GRAY2BGR)), axis=1)
blurRs=cv2.resize(blur,(640,360))
edgesRs=cv2.resize(edges,(640,360))
vidBuf1 = np.concatenate( (cv2.cvtColor(blurRs,cv2.COLOR_GRAY2BGR),cv2.cvtColor(edgesRs,cv2.COLOR_GRAY2BGR)), axis=1)
vidBuf = np.concatenate( (vidBuf, vidBuf1), axis=0)
if showWindow==1: # Show Camera Frame
displayBuf = frame
elif showWindow == 2: # Show Canny Edge Detection
displayBuf = edges
elif showWindow == 3: # Show All Stages
displayBuf = vidBuf
if showHelp == True:
cv2.putText(displayBuf, helpText, (11,20), font, 1.0, (32,32,32), 4, cv2.LINE_AA)
cv2.putText(displayBuf, helpText, (10,20), font, 1.0, (240,240,240), 1, cv2.LINE_AA)
cv2.imshow(windowName,displayBuf)
key=cv2.waitKey(10)
if key == 27: # Check for ESC key
cv2.destroyAllWindows()
break ;
elif key==49: # 1 key, show frame
cv2.setWindowTitle(windowName,"Camera Feed")
showWindow=1
elif key==50: # 2 key, show Canny
cv2.setWindowTitle(windowName,"Canny Edge Detection")
showWindow=2
elif key==51: # 3 key, show Stages
cv2.setWindowTitle(windowName,"Camera, Gray scale, Gaussian Blur, Canny Edge Detection")
showWindow=3
elif key==52: # 4 key, toggle help
showHelp = not showHelp
elif key==44: # , lower canny edge threshold
edgeThreshold=max(0,edgeThreshold-1)
print ('Canny Edge Threshold Maximum: ',edgeThreshold)
elif key==46: # , raise canny edge threshold
edgeThreshold=edgeThreshold+1
print ('Canny Edge Threshold Maximum: ', edgeThreshold)
elif key==74: # Toggle fullscreen; This is the F3 key on this particular keyboard
# Toggle full screen mode
if showFullScreen == False :
cv2.setWindowProperty(windowName, cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
else:
cv2.setWindowProperty(windowName, cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_NORMAL)
showFullScreen = not showFullScreen
else:
print ("camera open failed")
if __name__ == '__main__':
arguments = parse_cli_args()
print("Called with args:")
print(arguments)
print("OpenCV version: {}".format(cv2.__version__))
print("Device Number:",arguments.video_device)
if arguments.gsttheta=='nvdec':
video_capture=open_gst_thetauvc_nvdec()
elif arguments.gsttheta == 'auto':
video_capture=open_gst_thetauvc_auto()
else:
video_capture=open_theta_device(arguments.video_device)
read_cam(video_capture)
video_capture.release()
cv2.destroyAllWindows()