Could you advise me to get rid of this issue? it’s urgent
command 1: gst-launch-1.0 thetauvcsrc mode=4K ! queue ! h264parse ! decodebin ! queue ! autovideosink sync=false
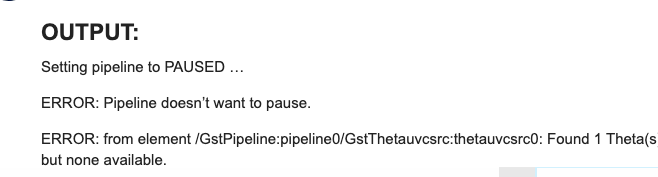
OUTPUT:
Setting pipeline to PAUSED …
ERROR: Pipeline doesn’t want to pause.
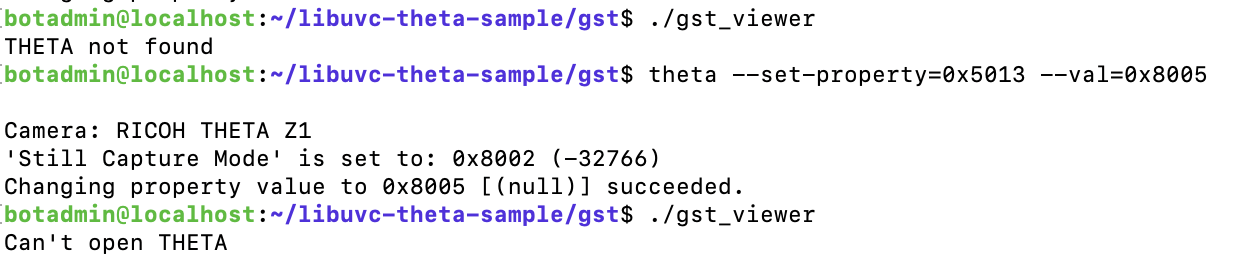
ERROR: from element /GstPipeline:pipeline0/GstThetauvcsrc:thetauvcsrc0: Found 1 Theta(s), but none available.
Additional debug info:
gstthetauvcsrc.c(513): gst_thetauvcsrc_start (): /GstPipeline:pipeline0/GstThetauvcsrc:thetauvcsrc0
Setting pipeline to NULL …
Freeing pipeline …
command 2:
import cv2
cap = cv2.VideoCapture(“thetauvcsrc
! decodebin
! autovideoconvert
! video/x-raw,format=BGRx
! queue ! videoconvert
! video/x-raw,format=BGR ! queue ! appsink”)
OUTPUT:
[ WARN:0@0.318] global cap_gstreamer.cpp:2839 handleMessage OpenCV | GStreamer warning: Embedded video playback halted; module thetauvcsrc0 reported: Found 1 Theta(s), but none available.
[ WARN:0@0.323] global cap_gstreamer.cpp:1698 open OpenCV | GStreamer warning: unable to start pipeline
[ WARN:0@0.323] global cap_gstreamer.cpp:1173 isPipelinePlaying OpenCV | GStreamer warning: GStreamer: pipeline have not been created
Traceback (most recent call last):
File “/home/botadmin/test.py”, line 11, in
raise IOError(‘Cannot open RICOH THETA’)
OSError: Cannot open RICOH THETA
more details:
Python 3.11.7 (main, Feb 12 2024, 13:14:15) [GCC 7.5.0] on linux
Type “help”, “copyright”, “credits” or “license” for more information.
import cv2
print(cv2.getBuildInformation())
General configuration for OpenCV 4.9.0 =====================================
Version control: 4.9.0
Platform:
Timestamp: 2024-03-15T08:55:31Z
Host: Linux 4.9.337-tegra aarch64
CMake: 3.10.2
CMake generator: Unix Makefiles
CMake build tool: /usr/bin/make
Configuration: RELEASE
CPU/HW features:
Baseline: NEON FP16
Dispatched code generation: NEON_DOTPROD NEON_FP16
requested: NEON_FP16 NEON_BF16 NEON_DOTPROD
NEON_DOTPROD (1 files): + NEON_DOTPROD
NEON_FP16 (2 files): + NEON_FP16
C/C++:
Built as dynamic libs?: YES
C++ standard: 11
C++ Compiler: /usr/bin/c++ (ver 7.5.0)
C++ flags (Release): -fsigned-char -W -Wall -Wreturn-type -Wnon-virtual-dtor -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wundef -Winit-self -Wpointer-arith -Wshadow -Wsign-promo -Wuninitialized -Wsuggest-override -Wno-delete-non-virtual-dtor -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -fvisibility-inlines-hidden -O3 -DNDEBUG -DNDEBUG
C++ flags (Debug): -fsigned-char -W -Wall -Wreturn-type -Wnon-virtual-dtor -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wundef -Winit-self -Wpointer-arith -Wshadow -Wsign-promo -Wuninitialized -Wsuggest-override -Wno-delete-non-virtual-dtor -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -fvisibility-inlines-hidden -g -O0 -DDEBUG -D_DEBUG
C Compiler: /usr/bin/cc
C flags (Release): -fsigned-char -W -Wall -Wreturn-type -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wmissing-prototypes -Wstrict-prototypes -Wundef -Winit-self -Wpointer-arith -Wshadow -Wuninitialized -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -O3 -DNDEBUG -DNDEBUG
C flags (Debug): -fsigned-char -W -Wall -Wreturn-type -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wmissing-prototypes -Wstrict-prototypes -Wundef -Winit-self -Wpointer-arith -Wshadow -Wuninitialized -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -g -O0 -DDEBUG -D_DEBUG
Linker flags (Release): -Wl,–gc-sections -Wl,–as-needed -Wl,–no-undefined
Linker flags (Debug): -Wl,–gc-sections -Wl,–as-needed -Wl,–no-undefined
ccache: NO
Precompiled headers: NO
Extra dependencies: dl m pthread rt
3rdparty dependencies:
OpenCV modules:
To be built: calib3d core dnn features2d flann gapi highgui imgcodecs imgproc ml objdetect photo python3 stitching ts video videoio
Disabled: world
Disabled by dependency: -
Unavailable: java python2
Applications: tests perf_tests examples apps
Documentation: NO
Non-free algorithms: NO
GUI: NONE
GTK+: NO
VTK support: NO
Media I/O:
ZLib: /usr/lib/aarch64-linux-gnu/libz.so (ver 1.2.11)
JPEG: /usr/lib/aarch64-linux-gnu/libjpeg.so (ver 80)
WEBP: build (ver encoder: 0x020f)
PNG: build (ver 1.6.37)
TIFF: build (ver 42 - 4.2.0)
JPEG 2000: build (ver 2.5.0)
OpenEXR: build (ver 2.3.0)
HDR: YES
SUNRASTER: YES
PXM: YES
PFM: YES
Video I/O:
DC1394: NO
FFMPEG: NO
avcodec: NO
avformat: NO
avutil: NO
swscale: NO
avresample: NO
GStreamer: YES (1.14.5)
v4l/v4l2: YES (linux/videodev2.h)
Parallel framework: pthreads
Trace: YES (with Intel ITT)
Other third-party libraries:
Lapack: NO
Eigen: YES (ver 3.3.4)
Custom HAL: YES (carotene (ver 0.0.1, Auto detected))
Protobuf: build (3.19.1)
Flatbuffers: builtin/3rdparty (23.5.9)
OpenCL: YES (no extra features)
Include path: /home/botadmin/opencv/3rdparty/include/opencl/1.2
Link libraries: Dynamic load
Python 3:
Interpreter: /home/botadmin/myenv/bin/python3 (ver 3.11.7)
Libraries: /usr/local/lib/libpython3.11.a (ver 3.11.7)
numpy: /home/botadmin/myenv/lib/python3.11/site-packages/numpy/core/include (ver 1.26.4)
install path: /home/botadmin/myenv/lib/python3.11/site-packages/cv2/python-3.11
Python (for build): /home/botadmin/myenv/bin/python3
Java:
ant: NO
Java: NO
JNI: NO
Java wrappers: NO
Java tests: NO
Install to: /home/botadmin/myenv
these are already installed and compiled :
gstthetauvc libusb-compat-0.1 libuvc-theta-sample libptp2-theta libuvc-theta v4l2loopback
echo $GST_PLUGIN_PATH
/usr/lib/aarch64-linux-gnu/gstreamer-1.0
echo $PKG_CONFIG_PATH
/usr/local/lib/pkgconfig and it has these two files libusb.pc libuvc.pc
please help me to run this script with opencv