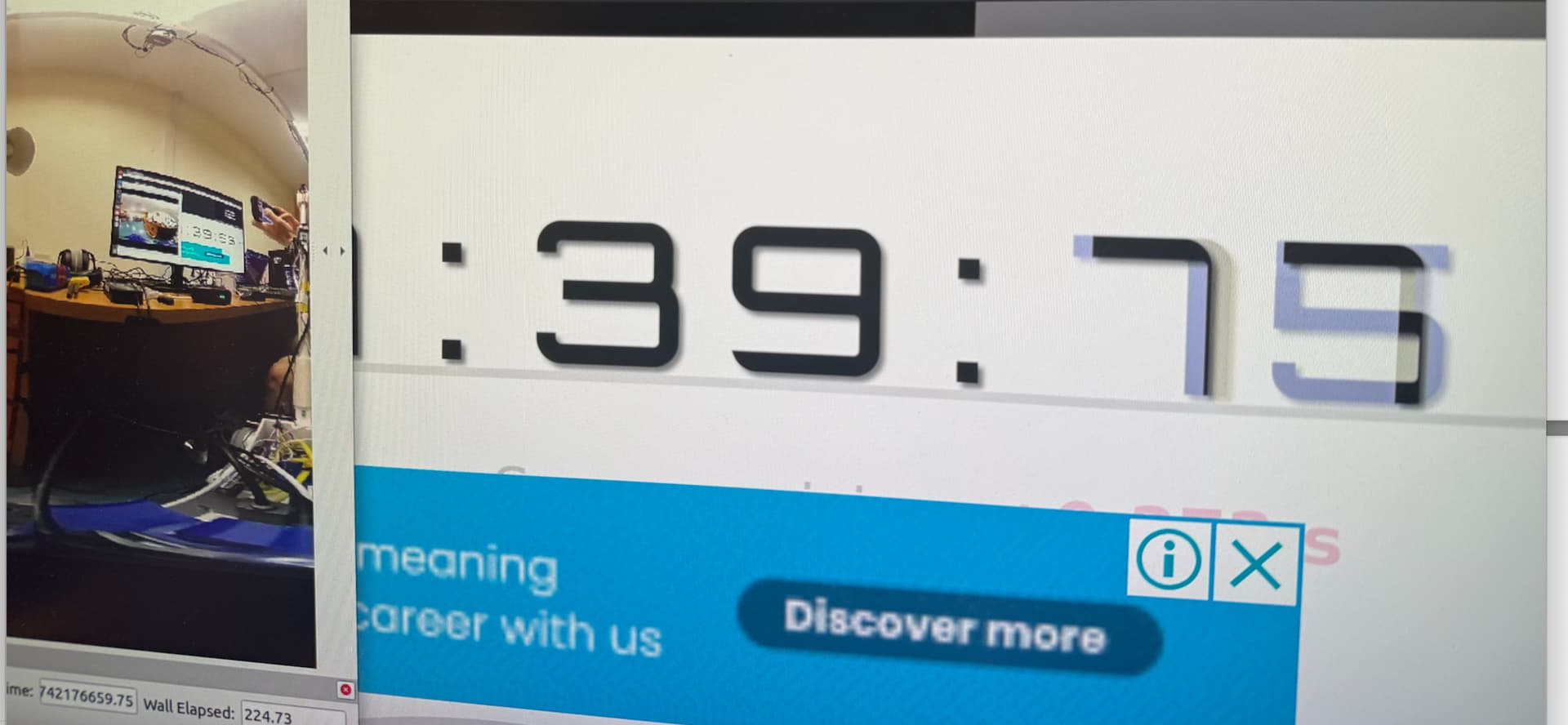
Hi, I have a Ricoh Theta Z1 and I can receive the real-time image from OpenCV SDK in livestream mode. However, I found that the timestamp of the received is around 0.5 seconds behind the actual world time. Then I tried to directly read from the libuvc-theta c++ package, and there’s still around 0.3 second delay (attached image left is the timestamp shown in RiCOH, right is the real world time). I try to align the image with Lidar data so this delay becomes a problem for me. I’m wondering if it’s just me or anyone else experience the same issue?
this is the common latency. there is no known solution to reduce latency.
This document has some additional info.
The camera stitches the two spheres internally. as far as I know, there is no option to change the frame processing pipeline to show the spheres like a webcam for each lens and jump pass the time taken for stitching.
You can try and contact RICOH directly.