Super great work you are all doing here! I have a project that I am doing right now in Panama where I am trying to make 360 Camera trap prototypes. We got the first up and going with the MADV camera because it was easy to control with two pins they had broken out that you can just short to turn the camera on and take photos, etc
But now i am trying to make one with the Theta V, but running into much more difficulties.
The basics we need are to:
Turn on the camera (and at least be able to turn it off) given a response from an autonomous Arduino
Trigger it to take a photo or record a video
turn itself back off (at least to sleep mode)
I asked Theta support and they told me it couldn’t be done.
But after some hacking, i have some promising findings.
A) If i connect an arduino via an OTG cable set up as a Human Interface Device (HID), and send it a key stroke, it will wake up from sleep
B) If i run the HID plugin on the Theta V, i can completely control the shooting with an Arduino emulating a keyboard (It’s great!). BUT the camera will not automatically start up in Plugin Mode
C) if i connect the CA-3 remote shutter, it can make the camera take photos without any plugin over the USB, BUT the CA-3 cannot wake the camera up.
So I am able to do all the actions i need, but not all with the same device.
Does anyone know
A) how to send the USB Api triggers from an Arduino? (Teensy has USB serial support)
B) How to start up the camera in plugin mode?
or
C) What the CA-3 is sending to trigger the photo?
Ah, but I can turn the camera on from sleep mode by sending a virtual keypress over an Arduino hooked up the the otg cable. So I can turn it on with the Arduino, I just need to be able to then use the Arduino to send a message to tell if the trigger and take a photo
Thanks for the info. I think i might have to end up going with the RPI, but it would be amazing if i could just go straight from the Arduino to just send a simple trigger because it could be super fast and super low power and i know it is physically doable!
But i just spoke with Oleg Mazurov, who wrote the PTP libraries, and it doesnt seem like ill be able to pull it off with an Arduino without extra hardware or a lot of coding to make it work with the Teensy
Although it may be possible to modify Oleg Mazurov’s code and example, I agree it may be a lot of work.
There’s many examples using the Raspberry Pi and USB to talk to the THETA. So, although there are problems with the Raspberry Pi, including clean shutdown, you can probably get something up quickly.
There’s a set of tutorials here:
Possible Serial Port Capability in the Future
On this thread, you can see that for hobbyist experiments, we can access the camera through the serial port. Note that this is not a good solution for production projects right now because it requires manual “permission setting” with something like Vysor. If you’re working on a potentially high-volume project, I can pass your requirements on to RICOH, which might help nudge them. Feel free to send me a DM, if this is a potentially high-volume camera sales project.
Bluetooth
This type of device connects to the THETA with Bluetooth. It’s theoretically possible to build something for Arduino, but there is no working example.
Appears that there is no easy-example PTP code for Arduino
I can’t find any Bluetooth example code to work with the THETA Bluetooth API
WiFi will work from Arduino and is easy, but I think you want the stability of a USB connection
Raspberry examples work and you can power the THETA from the same USB cable that sends commands. The RPi can power the THETA for taking pictures indefinitely.
You can send WiFi API commands over the serial cable from the Arduino to a plug-in, but this is only for “technical prototypes”
Current Recommendation
In order to get something working, I would try the Raspberry Pi and the RICOH THETA USB API. Once you have it working, you can either fine-tune it on the RPi or try another platform.
If you want to play around with the serial port, there are many examples of taking a picture from the serial port. Here’s a snippet. There are full code examples. Be aware that this strategy will not work unless the “serial port” of the camera is enabled with Vysor.
Wow really appreciate this very thorough info!
I agree that for now it does seem like the rpi is the way to go. I might play around with that serial a little bit more just because I’m curious, but yeah we’ll likely just try to do the Rpi USB commands and connect some sensors to the pi
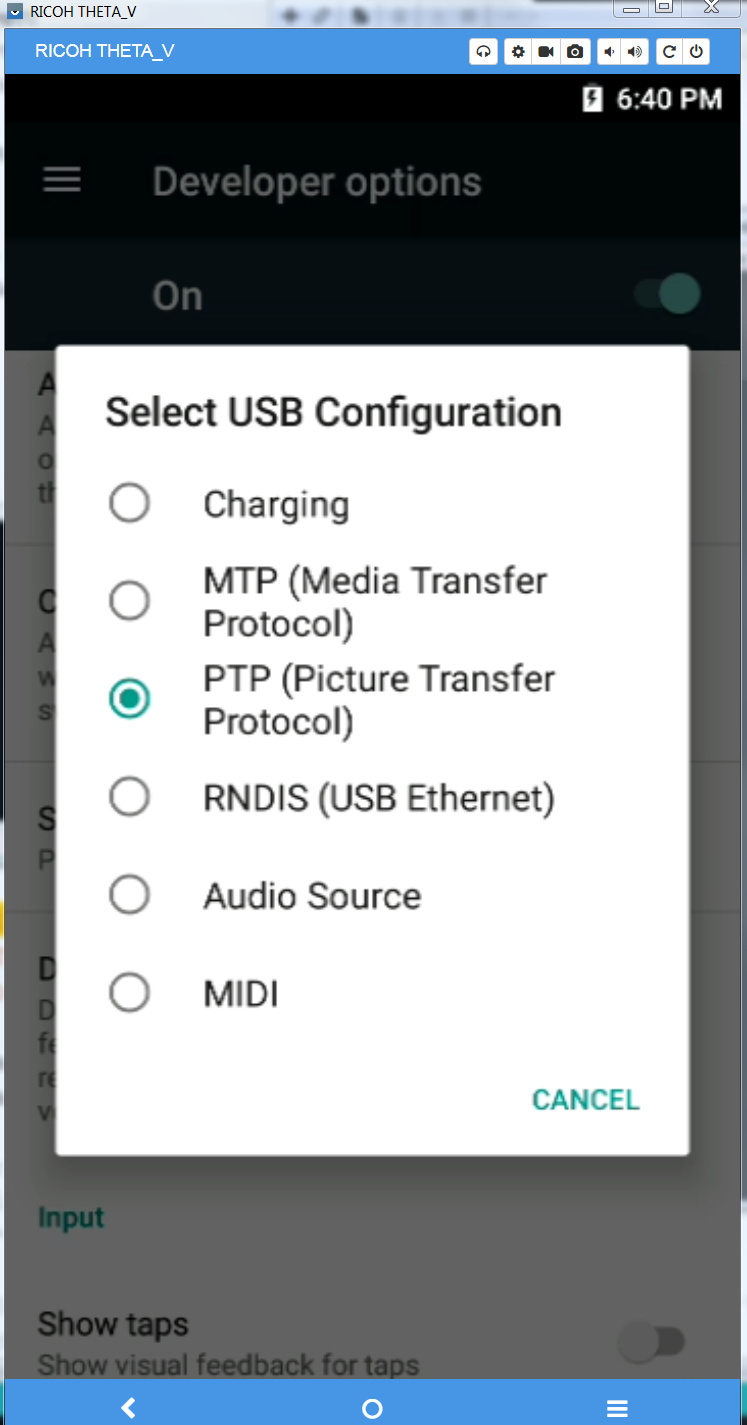
Able to get into the system with Vysor, and i can see the developer option i should choose to send those fake wifi commands, but anytime i choose anything other than PTP or Audio Source, the system just switches immediately back to PTP
odd!
(again, i should probably just be getting the RPi going, but this is a tricky enigma!)
also side note:
when you are hooking up the Pi Zero to the Theta, it appears to make a difference how you connect the OTG cable
That is, for me, i HAD to have the otg cable connected to the pi, and a regular USB cable to the theta for it to work (it was the opposite with an Arduino)
Ahhh dang, i think i have finally reached the final dead end.
I don’t think there is a way to
A) Remotely wake up the theta
and then
B) trigger it to take photos
in any kind of autonomous (especially low-power) way
In my mind i could have used the Keyboard stroke trick + the PTP of the rpi, BUT the OTG cable needs to be connected the opposite way for both of these approaches (which is bizarre to me, i always thought the OTG cable was just the 4 wires going to a different header, but for some magic reason it seems to make a difference!)
Has anyone successfully woken up the camera with a Pi-zero’s bluetooth, and then triggered it for photos?
ahhh i might have to abandon the Theta as a possible camera for this, which is too bad because it definitely seems feasible, but there are strange road blocks at every corner it seems
I use Theta V with raspberry pi. Gphoto works fine except for the shutterspeed ( you need to compile).
Theta wakes up when the raspberry pi starts and you can use the power off for theta. I think (i will try) a reboot of the pi will wakes up the theta V.
oh totally, this was just a quick test, i can control every bit of it very easy.
Basically i will have the Teensy send a virtual mouse click to wake up the Theta, and also have the servo move slightly to trigger it
i should be able to go from Sensor reading at PIR to photo captured in 1/2 a second (the goal against other camera traps right now)