If the camera is mounted as a filesystem, the stream may not work on the NVIDIA Jetson devices. See the following article.
this older article may also be relevant.
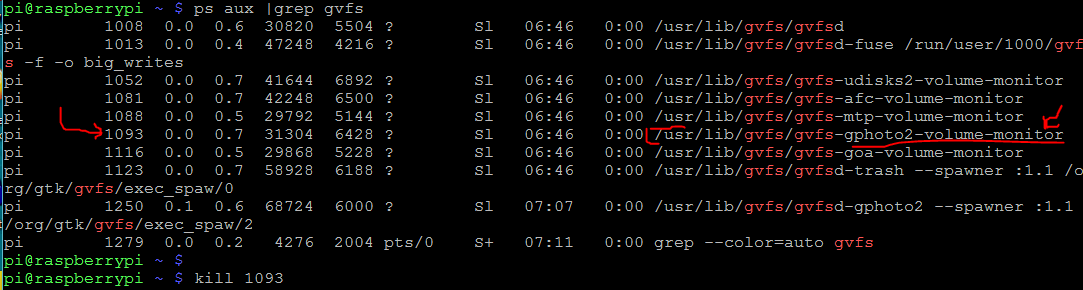
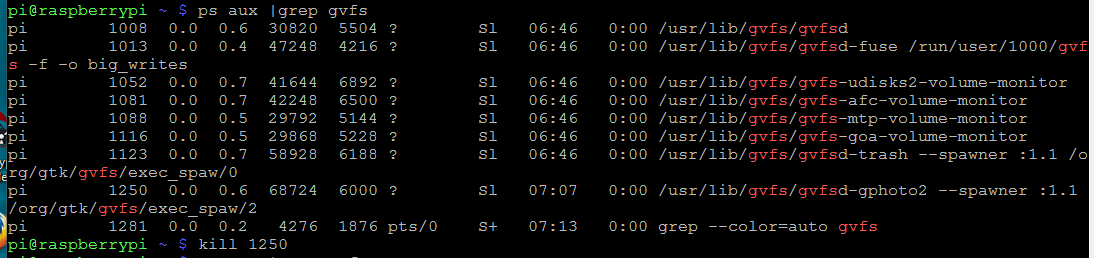
you can try kill the gphoto2-volume-monitor and spawner