craig
January 19, 2024, 5:37pm
8
If you plug a normal USB webcam into the Jetson, does it work with OpenCV?
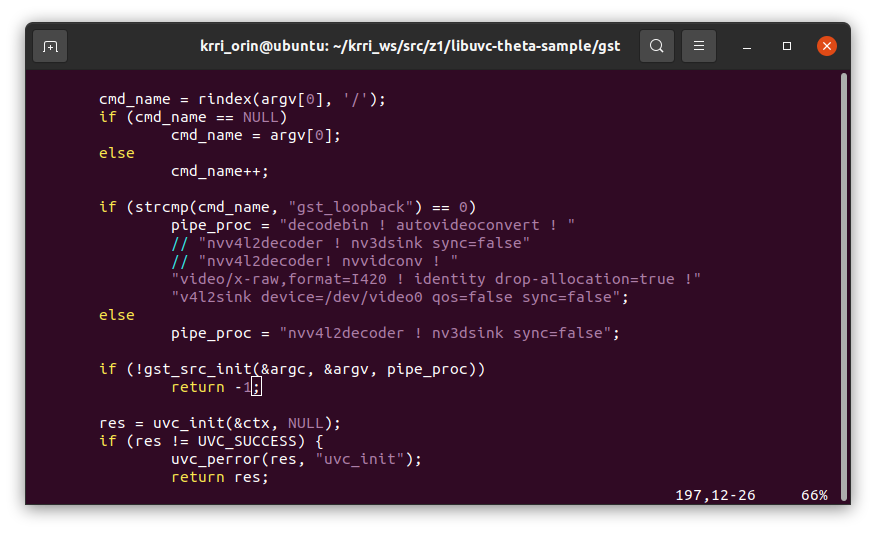
Is there a reason that the pipeline for gst_loopback is different from the pipeline after the else statement? Did the nvv4l2decoder ! nv3dsink not work in the gst_loopback section?
Did you see this article about using gstthetauvc instead on the Jetson platform?
I’ve been using Jetpack 4.6, which corresponds to L4T R32, Revision 6.1.
cat /etc/nv_tegra_release
# R32 (release), REVISION: 6.1
I recently met with a community member running L4T R32, Revision 7.1 and having problems with RICOH THETA X firmware 2.10.1.
To replicate the test with the newer version of Jetpack, I’m going first take a baseline test with Jetpack 4.6. I’ll then update this post with the install of Jetpack 4.6.4 (newest for Nano).
In this example, I’ve renamed ptpcam to theta i…
I tested gstthetauvc on Jetson Nano with OpenCV.