gstthetauvc on Jetson Nano
make
cd thetauvc/
craig@jetson:~/Documents/Development/gstthetauvc/thetauvc$ ls
gstglutils.c gstthetatransform.h gstthetauvcsrc.h thetauvc.c
gstglutils.h gstthetauvc.c Makefile thetauvc.h
gstthetatransform.c gstthetauvcsrc.c shader.h
craig@jetson:~/Documents/Development/gstthetauvc/thetauvc$ make
mkdir ./obj
cc -fPIC -g -Og -pthread -I/usr/local/include -I/usr/include/gstreamer-1.0 -I/usr/include/glib-2.0 -I/usr/lib/aarch64-linux-gnu/glib-2.0/include -I/usr/include/libusb-1.0 -c -o obj/gstthetauvc.o gstthetauvc.c
cc -fPIC -g -Og -pthread -I/usr/local/include -I/usr/include/gstreamer-1.0 -I/usr/include/glib-2.0 -I/usr/lib/aarch64-linux-gnu/glib-2.0/include -I/usr/include/libusb-1.0 -c -o obj/gstthetauvcsrc.o gstthetauvcsrc.c
cc -fPIC -g -Og -pthread -I/usr/local/include -I/usr/include/gstreamer-1.0 -I/usr/include/glib-2.0 -I/usr/lib/aarch64-linux-gnu/glib-2.0/include -I/usr/include/libusb-1.0 -c -o obj/thetauvc.o thetauvc.c
cc -shared -o gstthetauvc.so obj/gstthetauvc.o obj/gstthetauvcsrc.o obj/thetauvc.o -L/usr/local/lib -lgstbase-1.0 -lgstreamer-1.0 -lgobject-2.0 -lglib-2.0 -luvc -lusb-1.0
craig@jetson:~/Documents/Development/gstthetauvc/thetauvc$
install
sudo cp gstthetauvc.so /usr/lib/aarch64-linux-gnu/gstreamer-1.0/
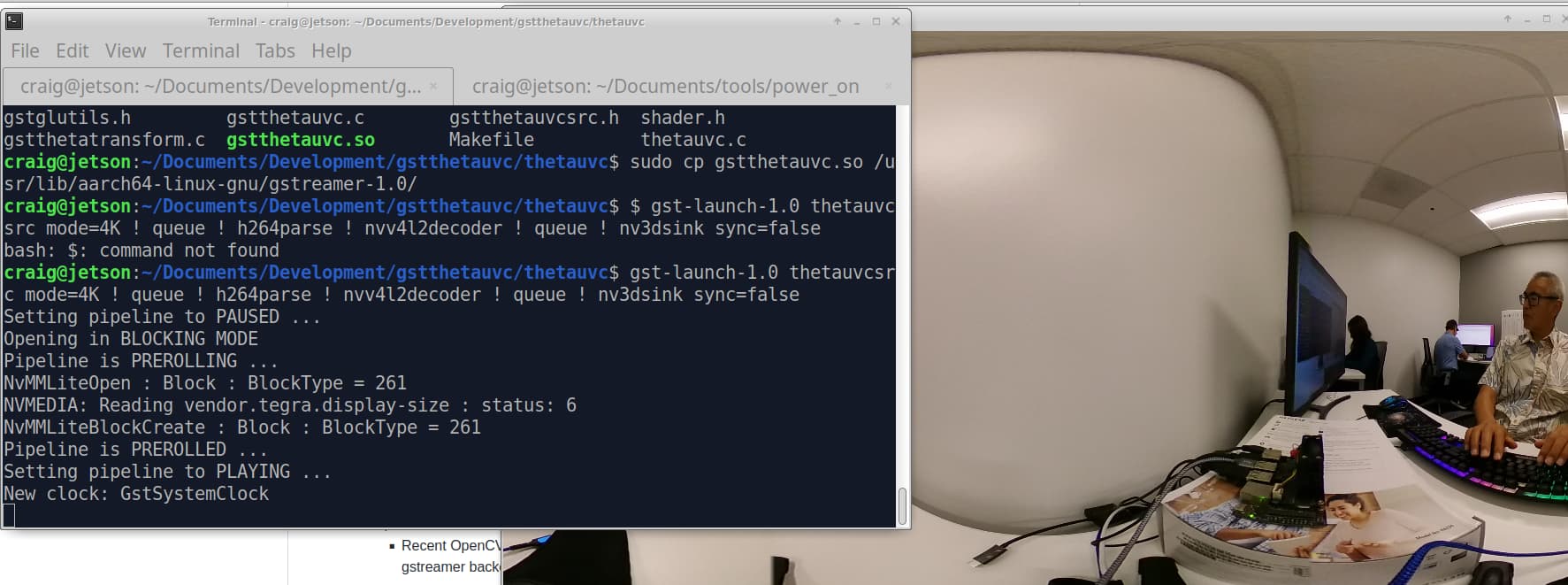
use
gst-launch-1.0 thetauvcsrc mode=4K ! queue ! h264parse ! nvv4l2decoder ! queue ! nv3dsink sync=false
result
Successful
OpenCV Test
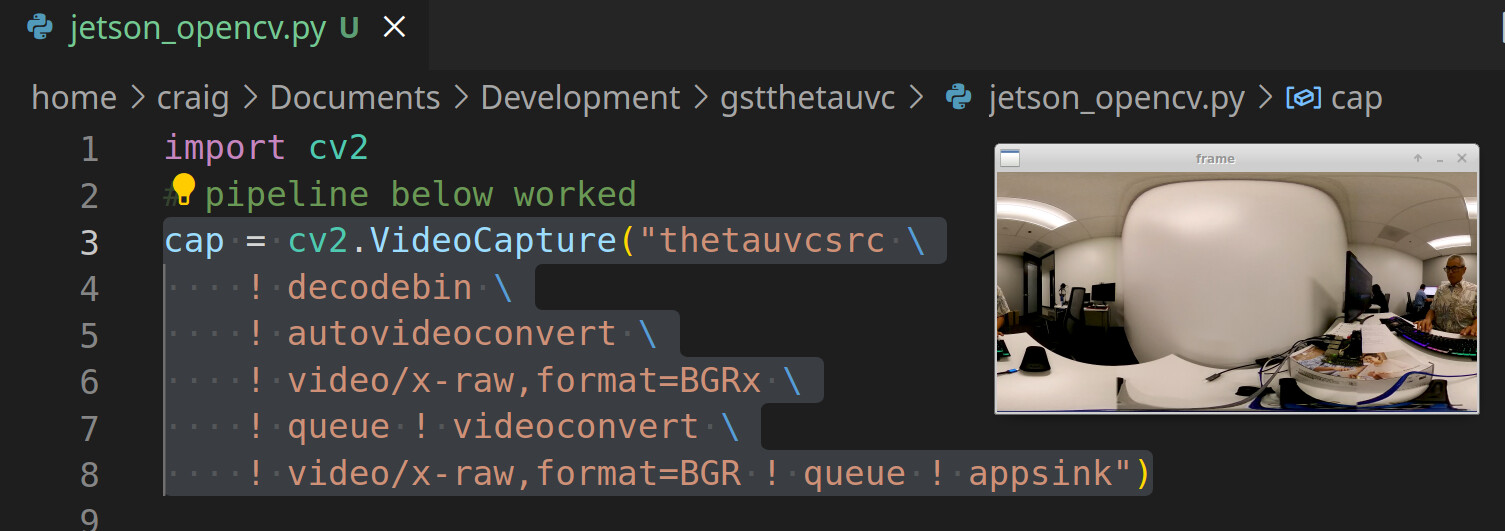
import cv2
# pipeline below worked on Jetson and x86
cap = cv2.VideoCapture("thetauvcsrc \
! decodebin \
! autovideoconvert \
! video/x-raw,format=BGRx \
! queue ! videoconvert \
! video/x-raw,format=BGR ! queue ! appsink")
# pipeline suggestion thanks to nickel110
# attempt to force hardware acceleration
# tested with NVIDIA 510.73 with old GTX 950 on Ubuntu 22.04
# cap = cv2.VideoCapture("thetauvcsrc \
# ! queue \
# ! h264parse \
# ! nvdec \
# ! gldownload \
# ! queue \
# ! videoconvert n-threads=0 \
# ! video/x-raw,format=BGR \
# ! queue \
# ! appsink")
# NVIDIA Jetson
# cap = cv2.VideoCapture("thetauvcsrc \
# ! nvv4l2decoder \
# ! nvvidconv \
# ! video/x-raw,format=BGRx \
# ! queue ! videoconvert \
# ! video/x-raw,format=BGR ! queue ! appsink")
if not cap.isOpened():
raise IOError('Cannot open RICOH THETA')
while True:
ret, frame = cap.read()
frame = cv2.resize(frame, None, fx=0.25, fy=0.25, interpolation=cv2.INTER_AREA)
cv2.imshow('frame', frame)
c = cv2.waitKey(1)
if c == 27:
break
cap.release()
cv2.destroyAllWindows()
Find JetPack version - Method #1
sudo apt-cache show nvidia-jetpack
[sudo] password for craig:
Package: nvidia-jetpack
Version: 4.4.1-b50
Architecture: arm64
Maintainer: NVIDIA Corporation
Find JetPack Version - Method #2
cat /etc/nv_tegra_release
# R32 (release), REVISION: 4.4, GCID: 23942405, BOARD: t210ref, EABI: aarch64, DATE: Fri Oct 16 19:44:43 UTC 2020