I’m not sure it works with virtualbox. Do you have a spare NVIDIA Jetson lying around? Or, try booting the Windows computer from an external SSD directly into Linux.
It may work with virtualbox, but we have no reported success.
Do you have Virtualbox working with a normal webcam and something like OpenCV? If so, what device number is the existing webcam on the Linux OS?
Hi,
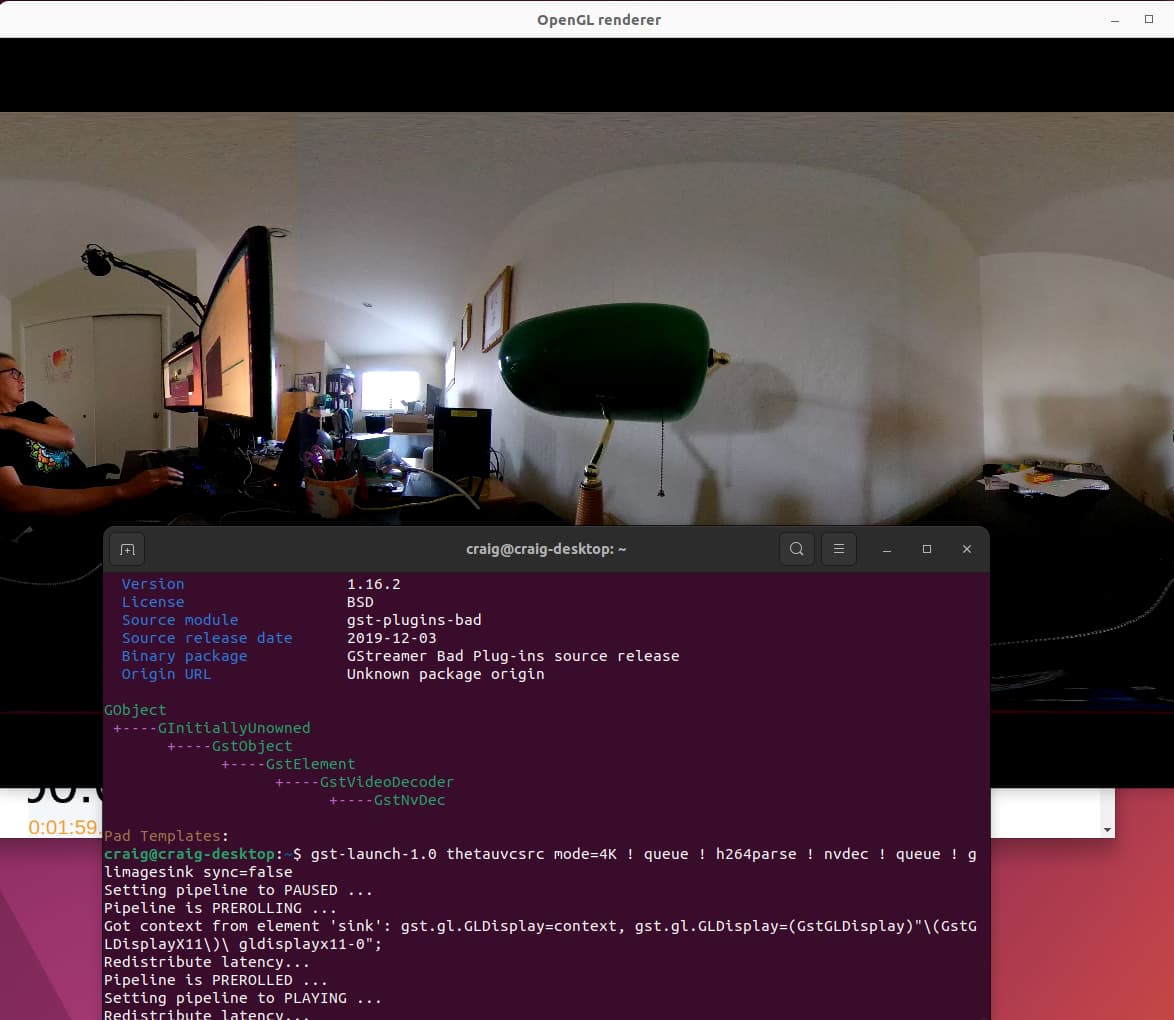
I tried in another computer with ubuntu and everything worked fine and streamed . but now in my main computer i installed ubuntu 20.04 and did exactly same and it says Theta not found. can you help on this issue. ?
saad@sam:~$ v4l2-ctl --list-devices
Integrated Camera: Integrated C (usb-0000:05:00.3-3):
/dev/video0
/dev/video1
saad@sam:~$ lsusb
Bus 004 Device 003: ID 05ac:100e Apple, Inc. USB3.0 Hub
Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 003 Device 003: ID 0bda:4852 Realtek Semiconductor Corp. Bluetooth Radio
Bus 003 Device 006: ID 05ca:2715 Ricoh Co., Ltd RICOH THETA Z1
Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 002 Device 002: ID 05e3:0620 Genesys Logic, Inc. USB3.2 Hub
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 001 Device 003: ID 048d:c101 Integrated Technology Express, Inc. ITE Device(8910)
Bus 001 Device 005: ID 046d:c52b Logitech, Inc. Unifying Receiver
Bus 001 Device 004: ID 045e:070f Microsoft Corp. LifeChat LX-3000 Headset
Bus 001 Device 002: ID 05e3:0610 Genesys Logic, Inc. 4-port hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Hi @craig now it works on my work laptop as well. I dont know how but the stream has started. I thankyou for your immense support. I will be posting alot on this form
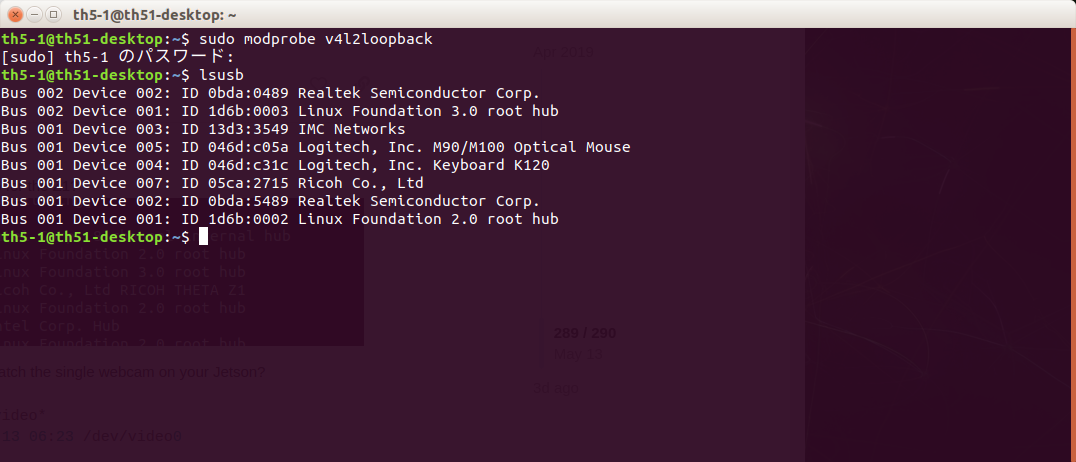
To use v4l2loopback, you must run sudo modprobe v4l2loopback each time. Alternately, you can have it load automatically in /etc/modules-load.d/modules.conf.
You can verify that the v4l2loopback module is loaded with lsmod
@craig
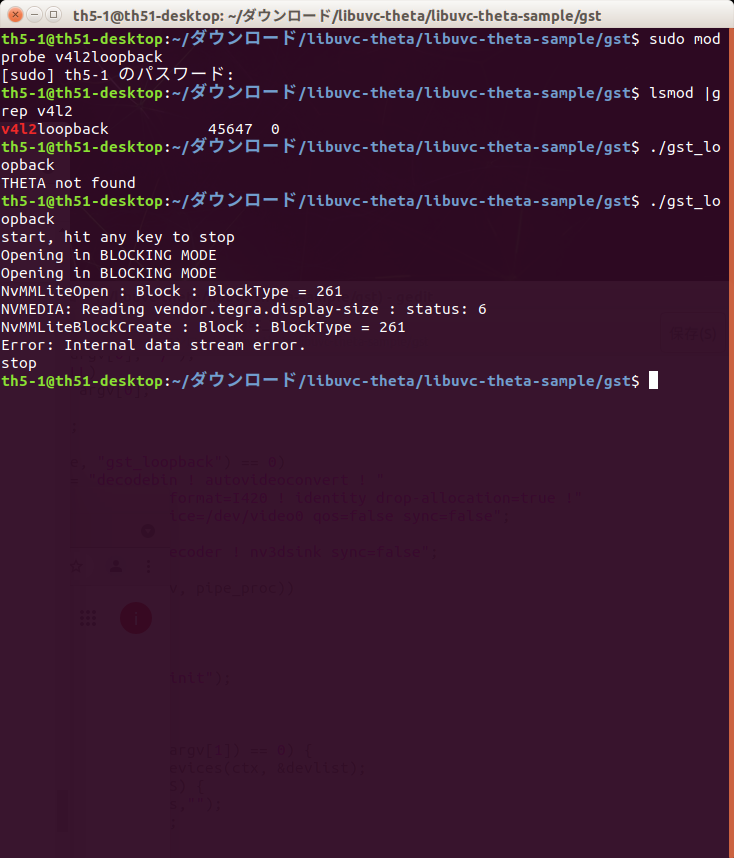
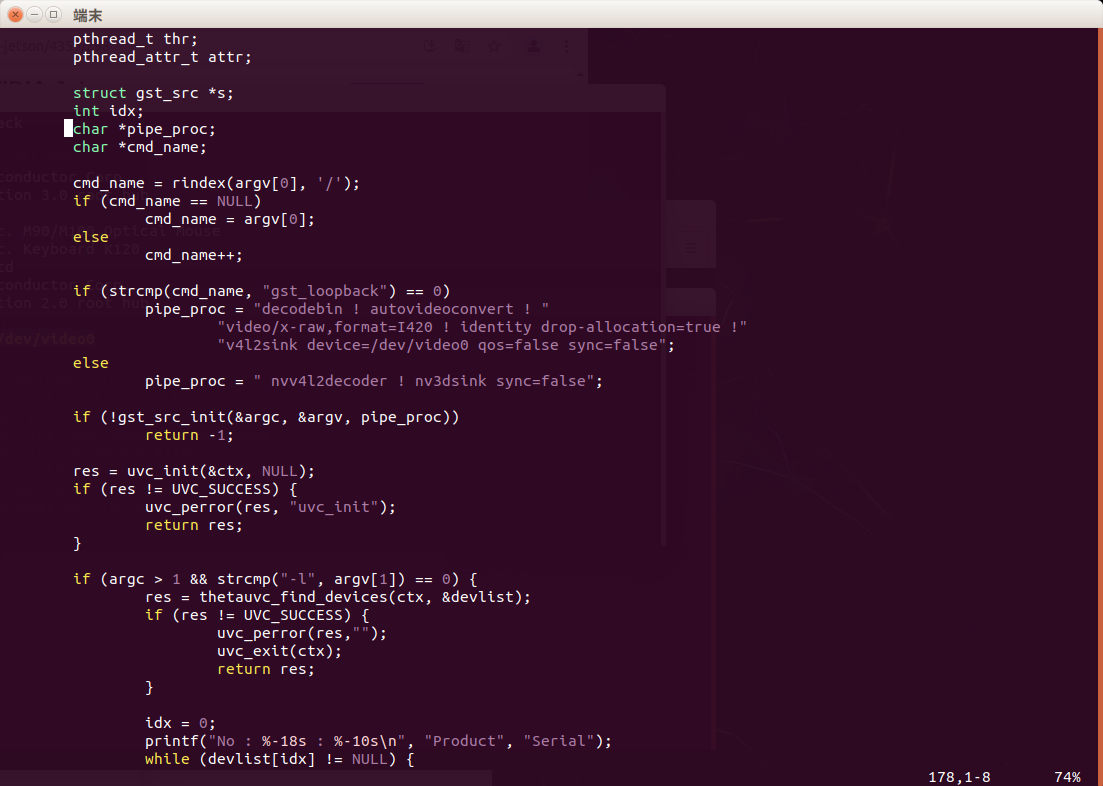
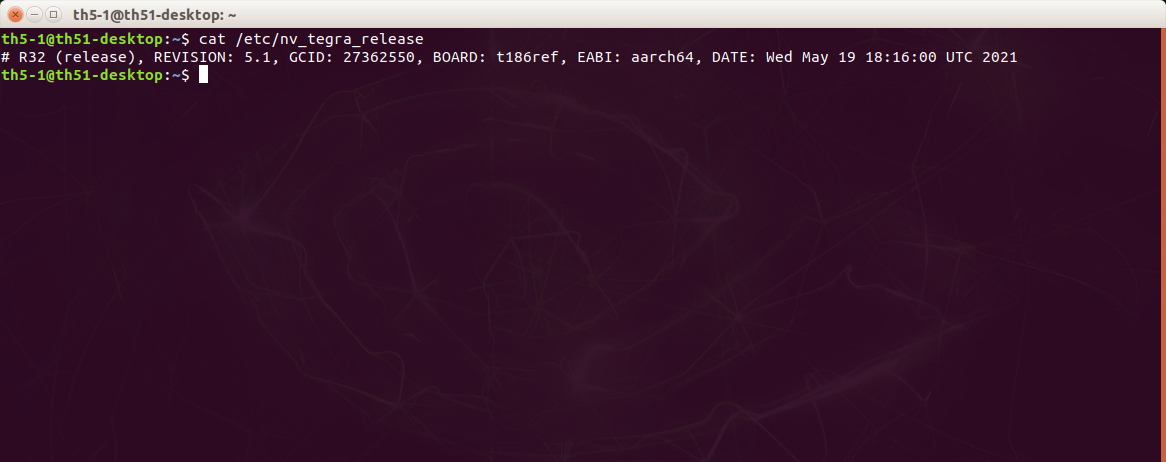
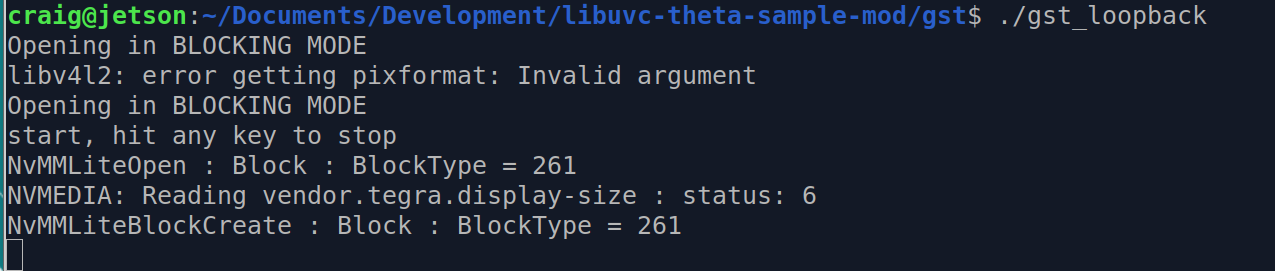
We faced a problem when we used JetsonNX+ThetaZ1. The gst_viewer works well, but the gst_loopback doesn’t work with an error msg. of internal data stream error.
Although we confirmed others also faced the same problem and solved that, we are still confusing how to fix this problem. Would you please give us some opinions?
Thank you very much for your reply.
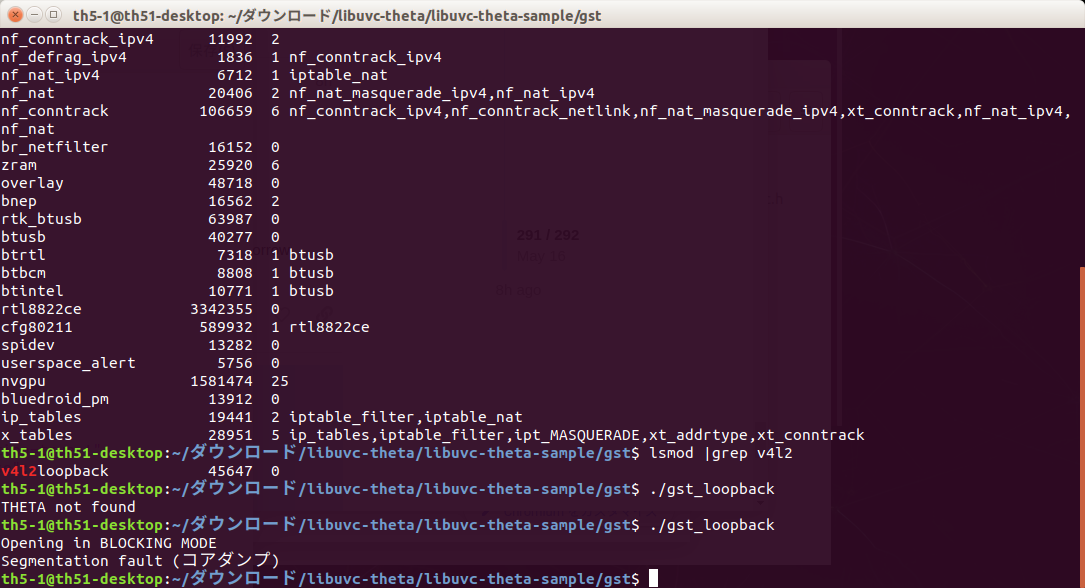
We took the screenshot. We loaded the module and output also showed correctly lsmod |grep v4l2.
But the error still occurred.
Does any other considerable problem exist?
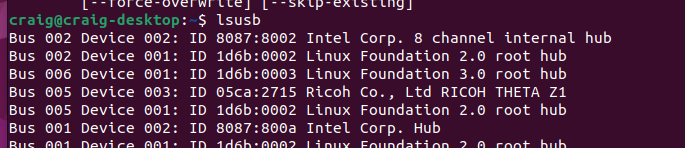
craig@craig-desktop:~/Development/ricoh/libuvc-theta-sample/gst$ date
Fri May 13 06:26:37 AM PDT 2022
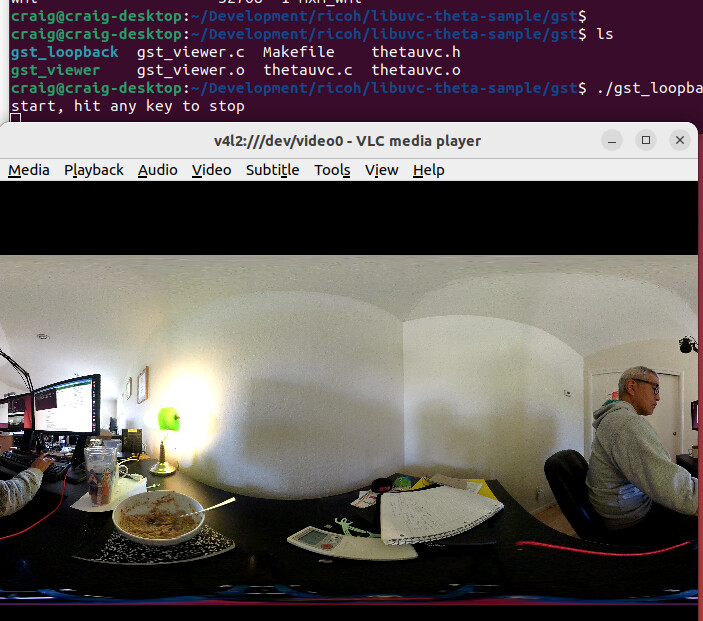
craig@craig-desktop:~/Development/ricoh/libuvc-theta-sample/gst$ ./gst_loopback
start, hit any key to stop
Thank you for your reply.
We checked what you mentioned.
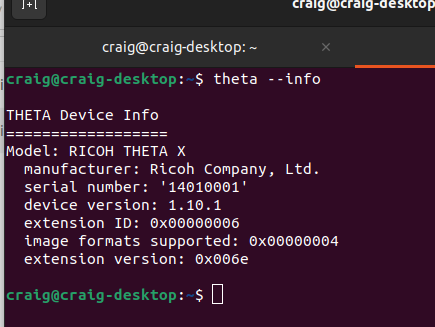
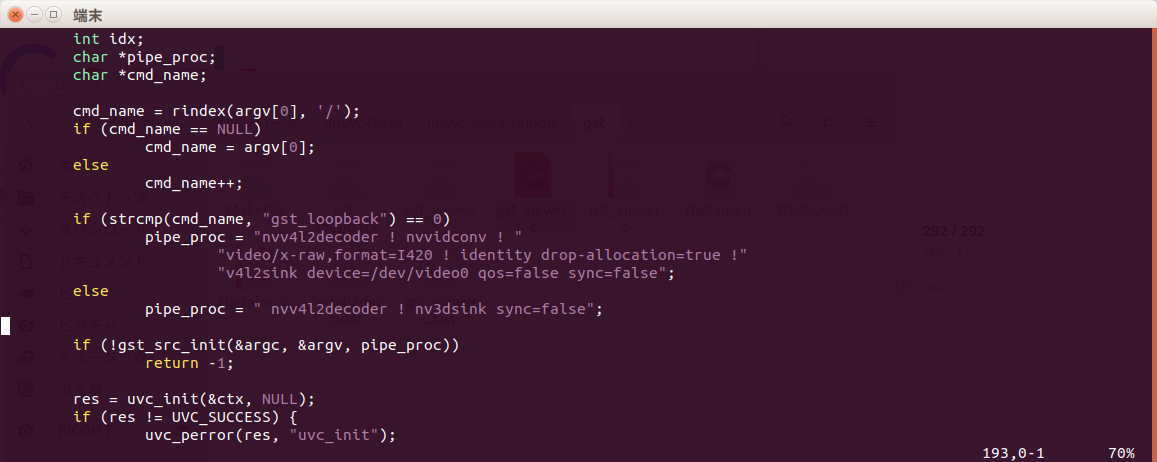
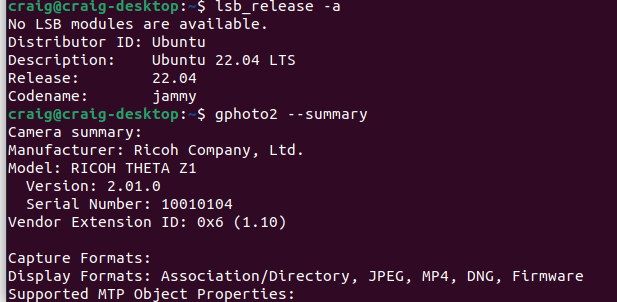
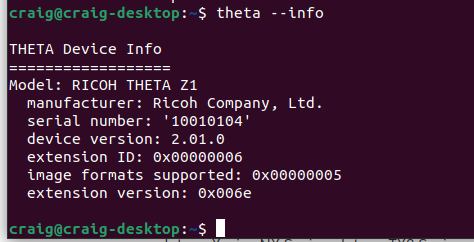
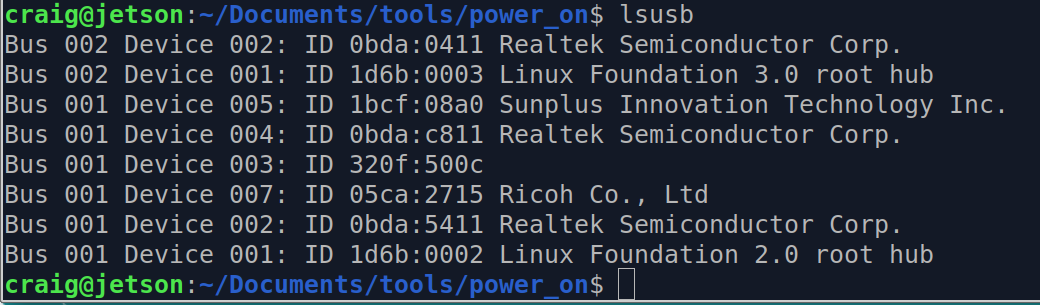
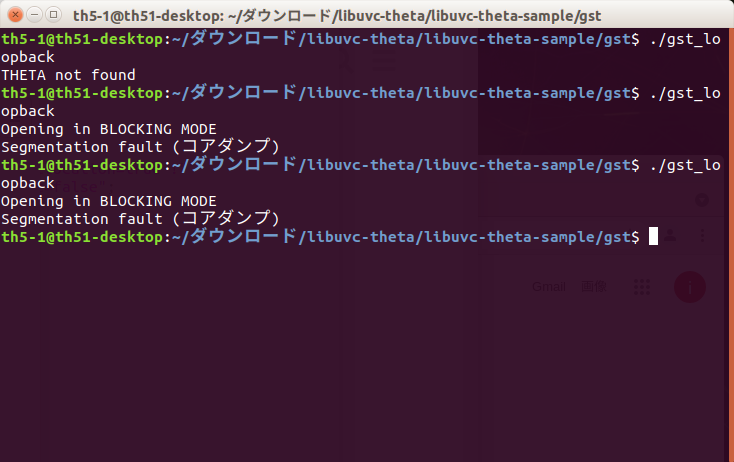
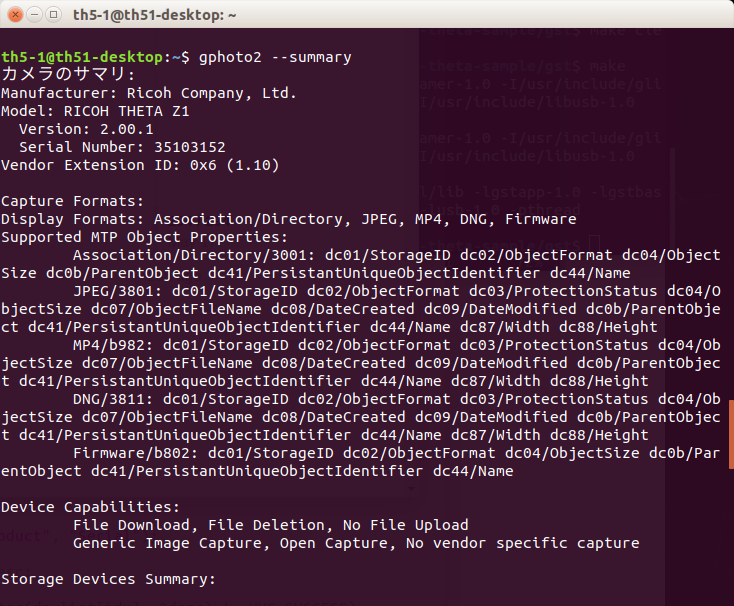
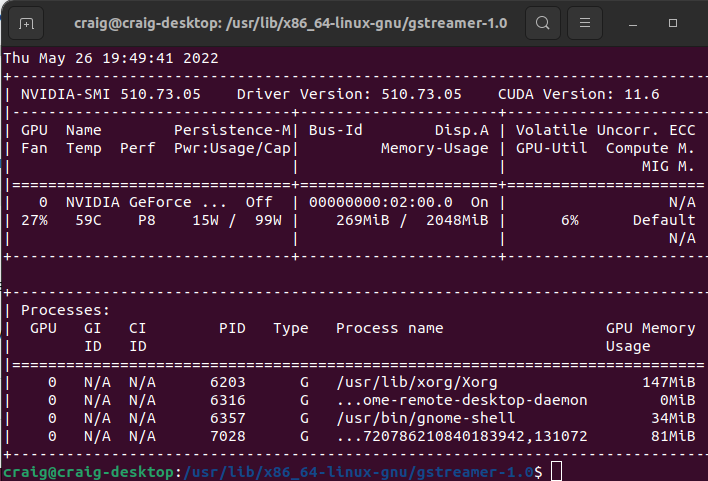
First, we executed lsusb, the output was 2715. But the device name only showed Ricoh Co., Ltd without the camera type.
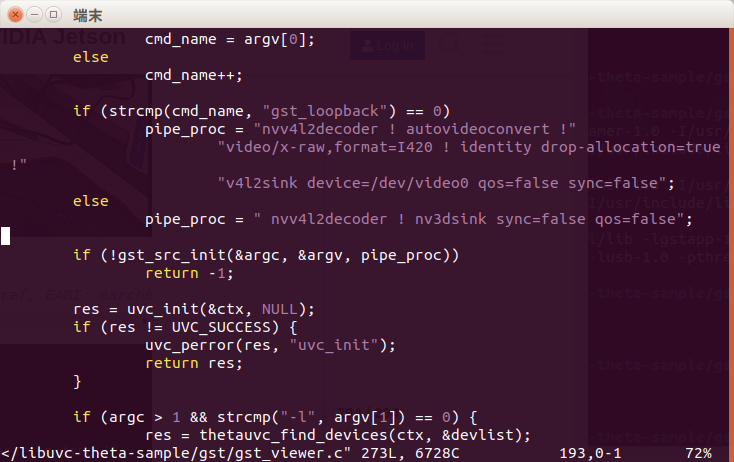
We tried to instead those codes as you mentioned in gst_viewer.c and then ran the command again. It shows that gst_loopback opening in blocking mode and segmentation fault.
lshw -C system
WARNING: you should run this program as super-user.
jetson
description: Computer
product: NVIDIA Jetson Nano Developer Kit
serial:
width: 64 bits
capabilities: smp cp15_barrier setend swp