I do not have access to a spot. Is it a form of Linux?
consider gstthetauvc
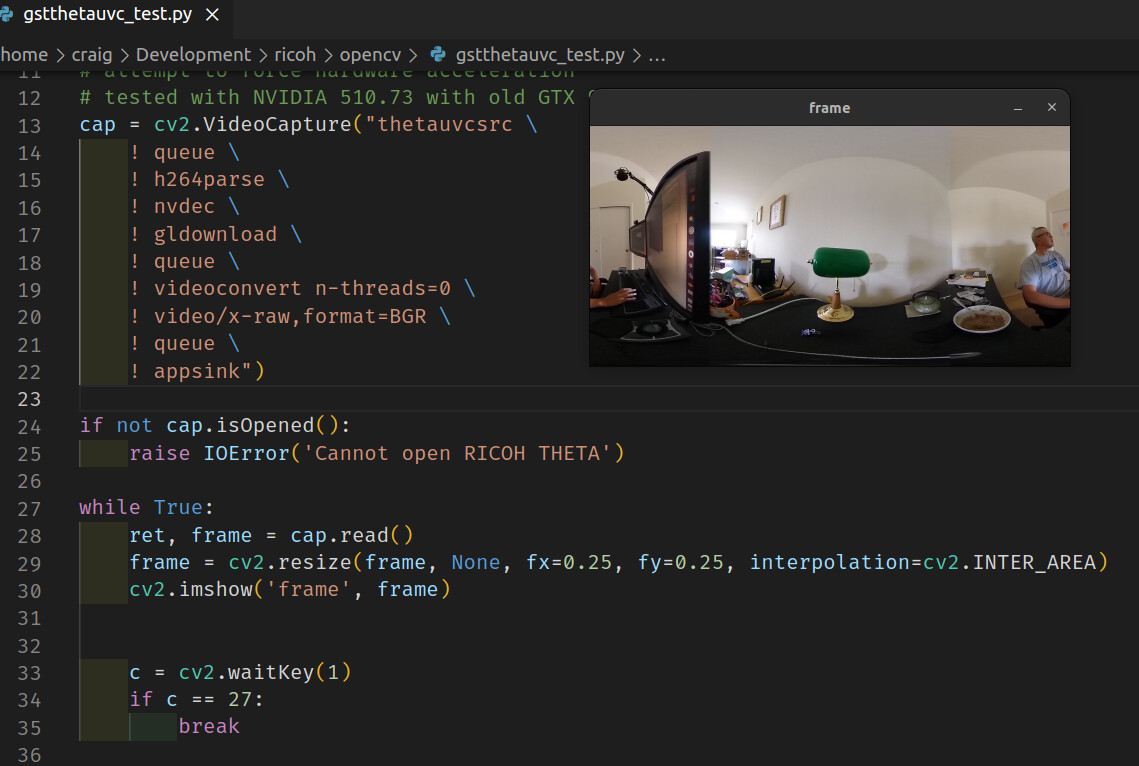
Assuming you are using OpenCV, there are two ways to access the camera:
- v4l2loopback will create a virtual video device
/dev/video0 or /dev/video1 that you can use to access the device from OpenCV
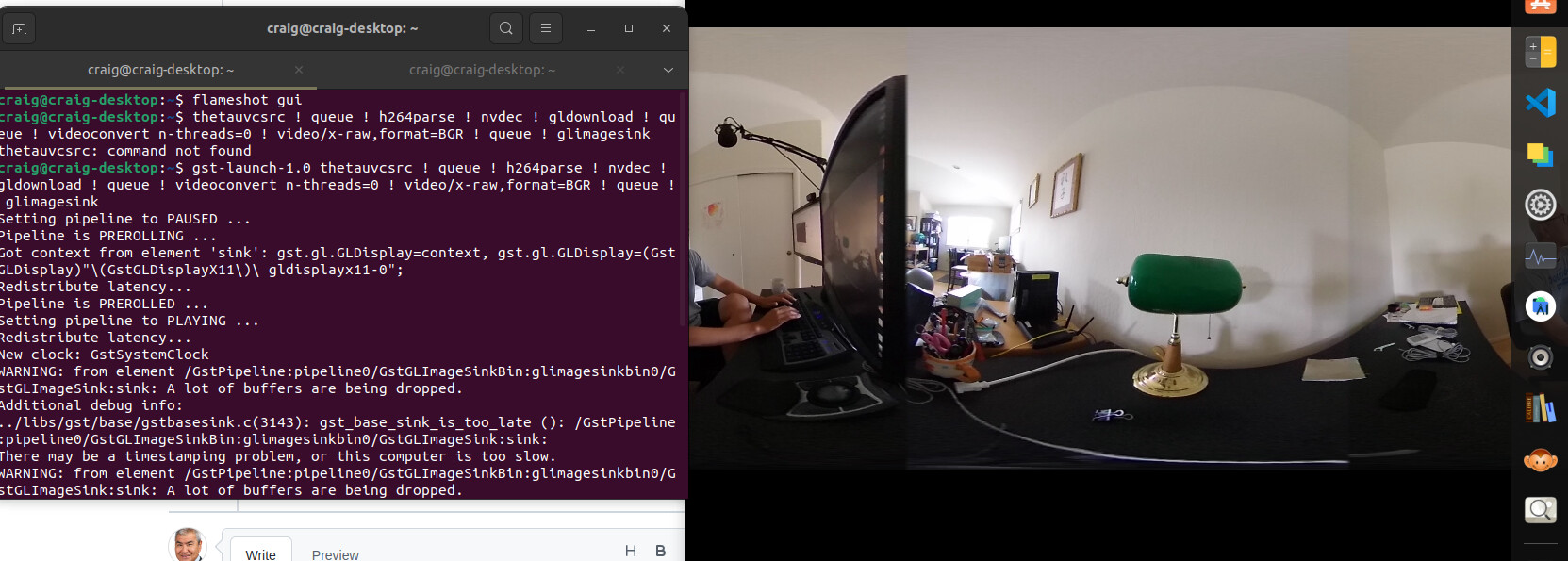
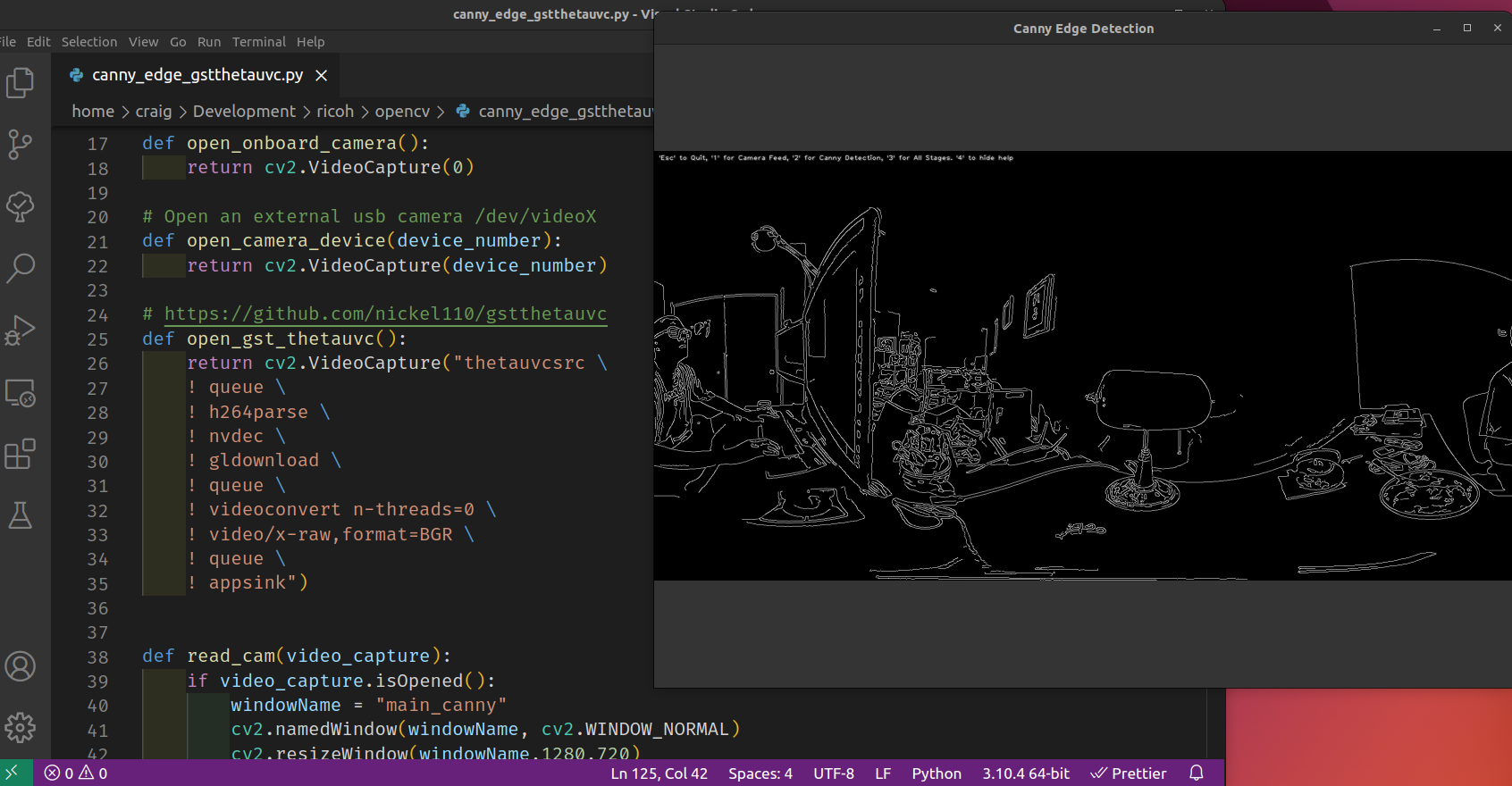
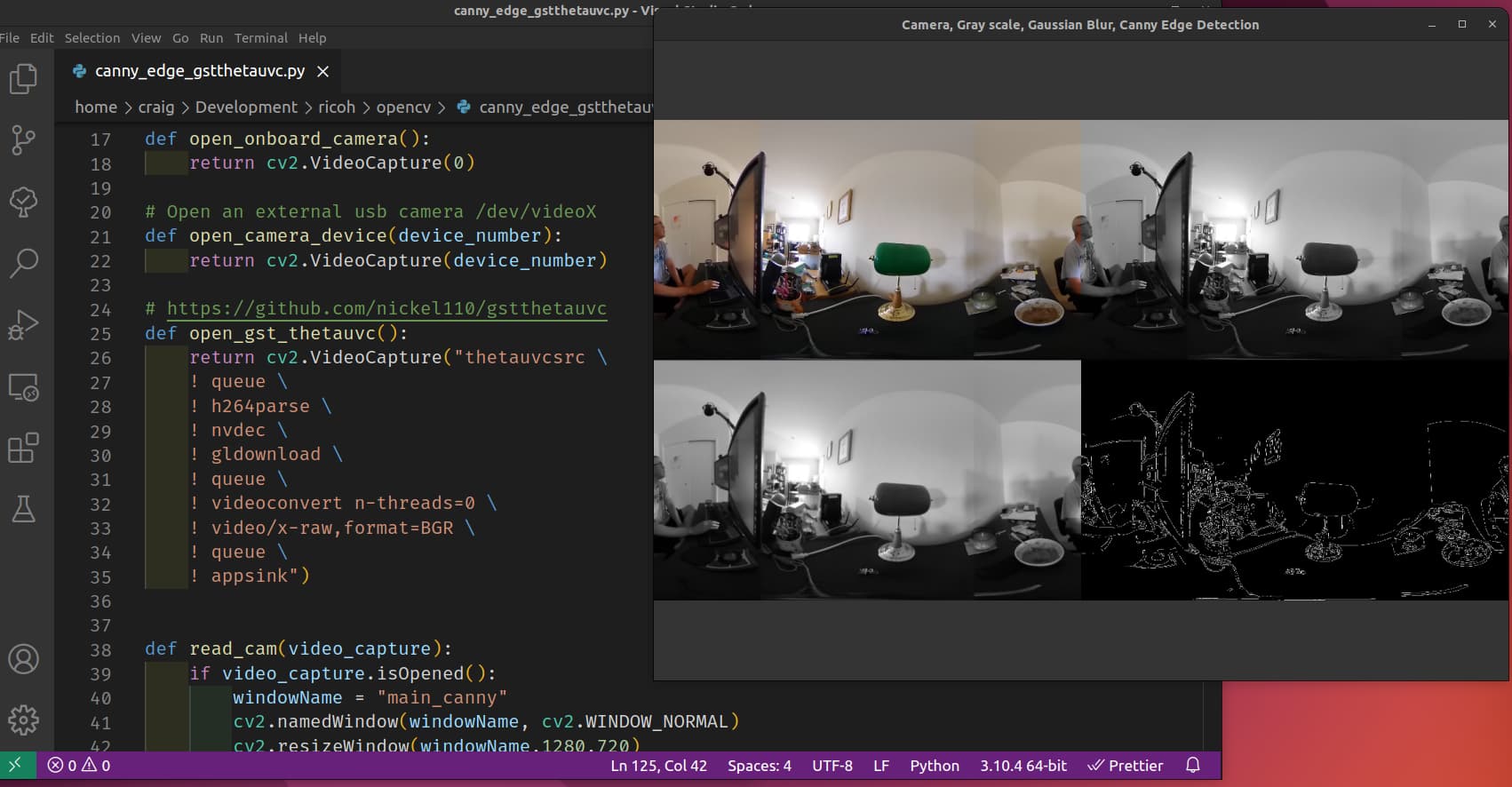
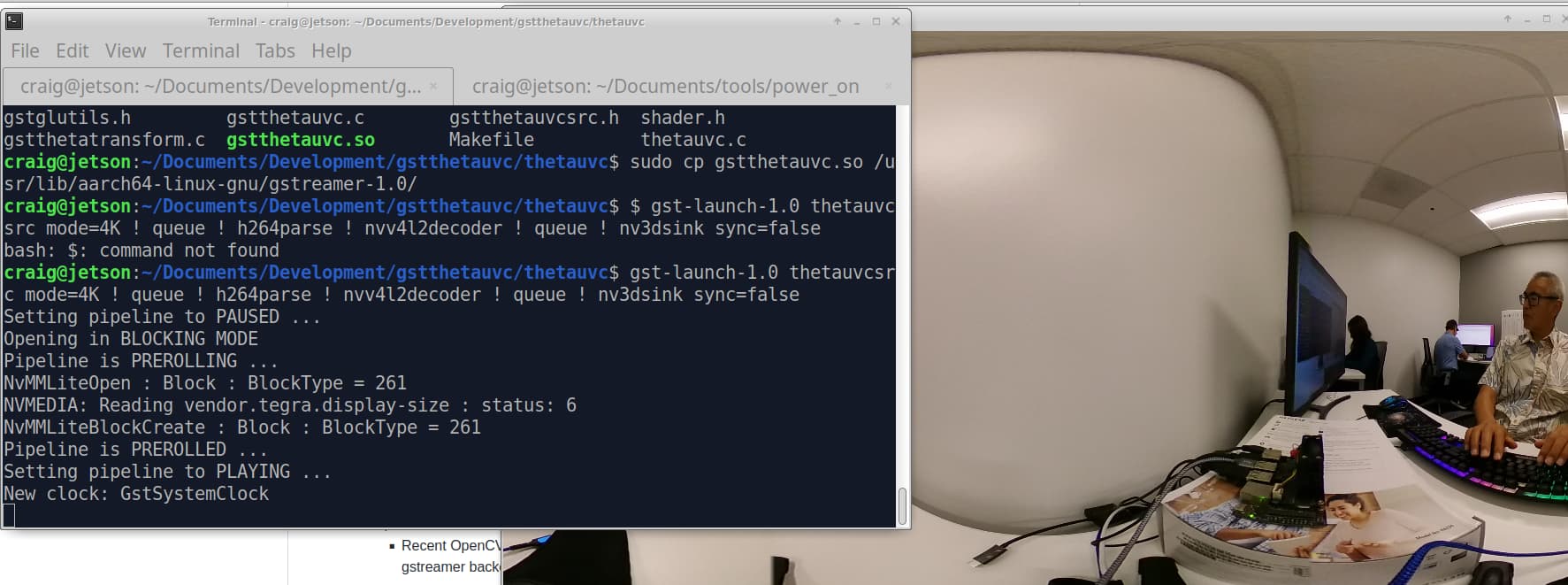
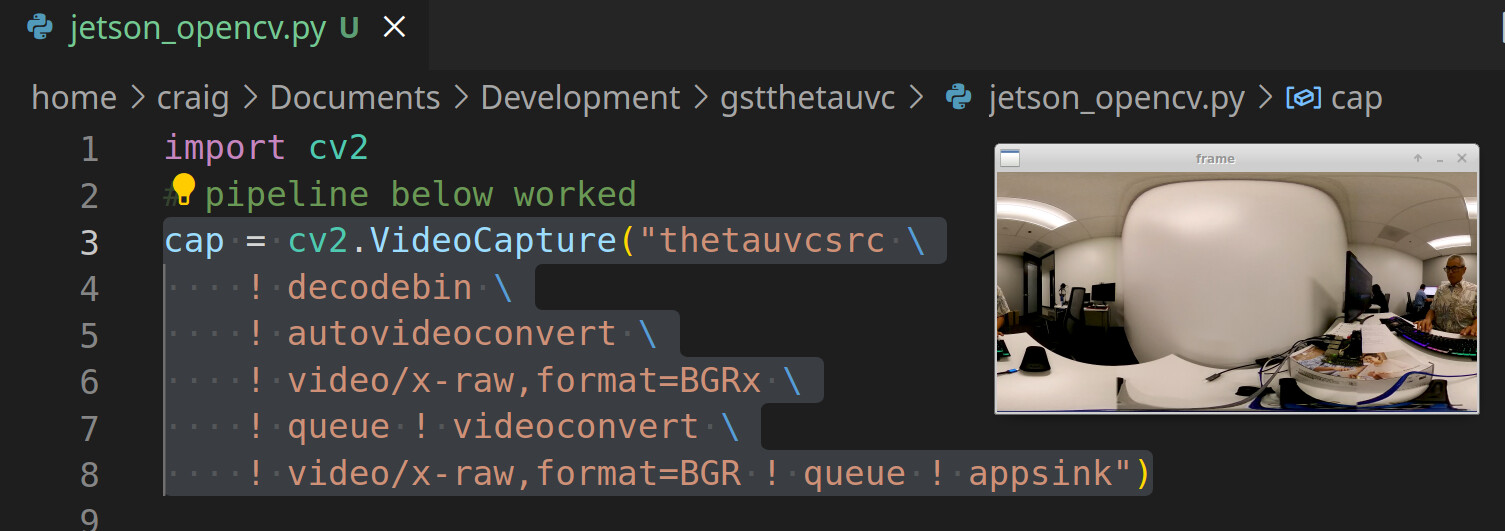
- use gstthetauvc to eliminate v4l2loopback
See this article on using gstthetauvc
https://codetricity.github.io/theta-linux/software/#using-gstthetauvc-to-eliminate-v4l2loopback
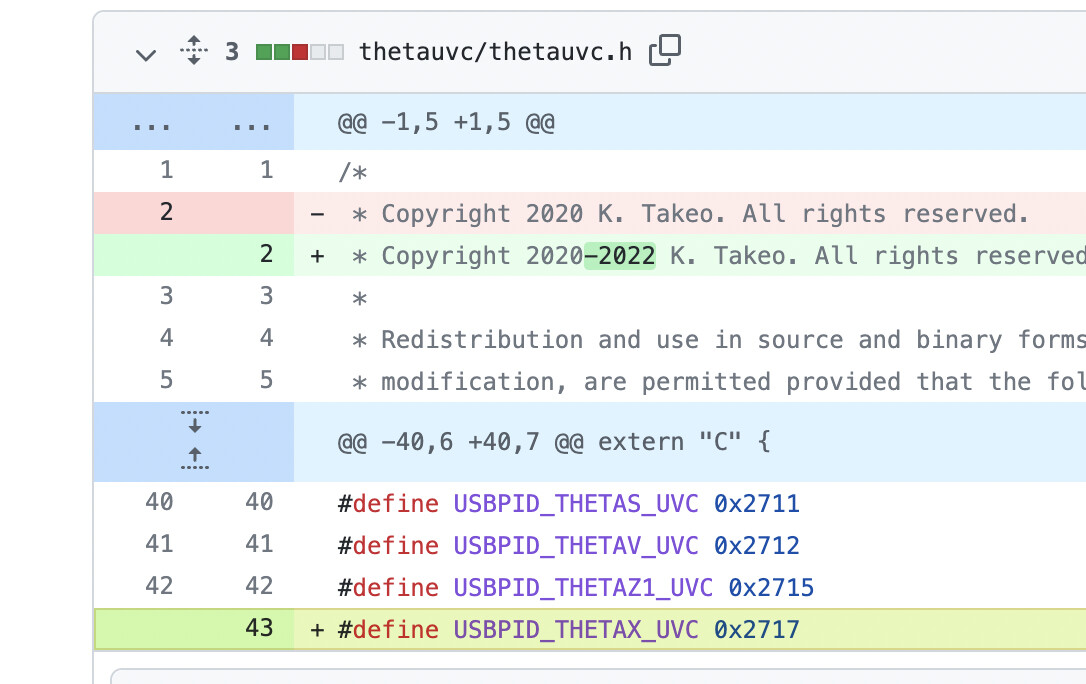
gstthetauvc is available here:
GitHub - nickel110/gstthetauvc: Gstreamer theta uvc plugin
The recommended approach is to use gstthetauvc instead of v4l2loopback.
The tutorial you are looking at is a bit old and most of the content was written before gstthetauvc was released. I should update it, but haven’t had the time. If there’s more interest in this type of deployment, I will prioritize the documentation update. If you are able, can you tell me what you are using the spot for and if it is a large deployment. This forum receives sponsorship from RICOH and I like to tell them that our documentation is in response to community demand. You can also send me a direct message if your deployment information is not appropriate to post in a public forum.
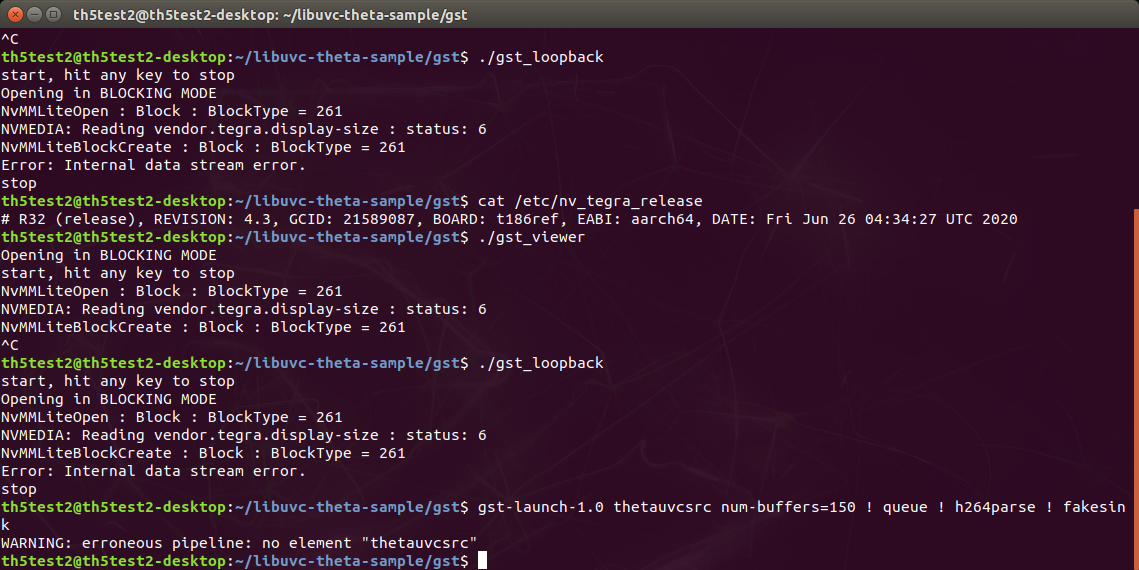
Can't open THETA error
This indicates that the device cannot be found on the spot. Does the spot already have another video camera at /dev/video0? If not, change line 190 to /dev/video0.
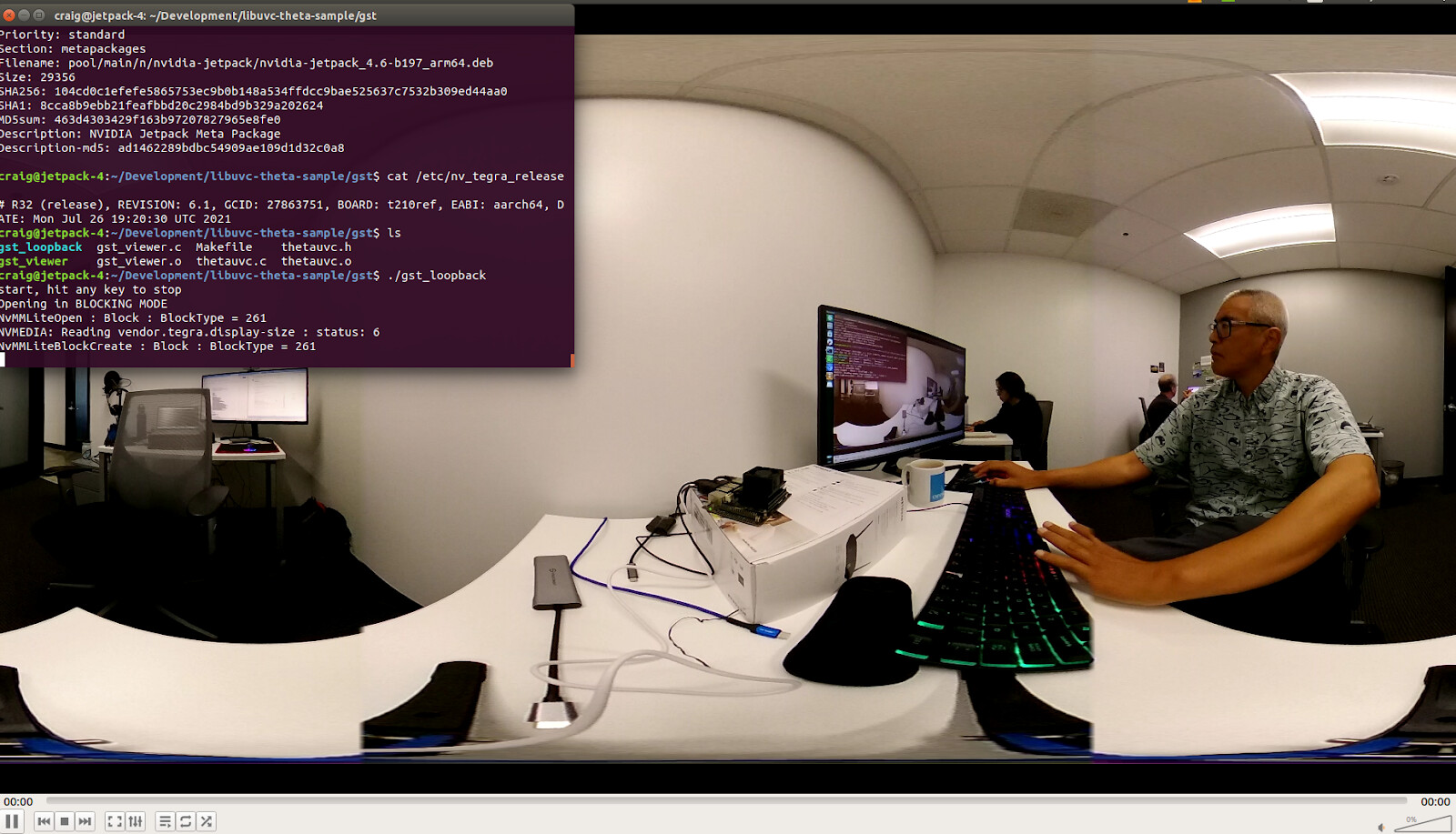
on the spot, can you see the THETA Z1 with gst_viewer ? Not gst_loopback.
$ ./gst_viewer -l
No : Product : Serial
0 : RICOH THETA Z1 : 10010104
on the spot, can you see the v4l2loopback module loaded in the kernel?
$ lsmod
Module Size Used by
uvcvideo 88565 0
bnep 16562 2
zram 26166 4
overlay 48691 0
spidev 13282 0
v4l2loopback 37383 0
or
on the spot, can you see the dummy video device.
$ v4l2-ctl --info
Driver Info (not using libv4l2):
Driver name : v4l2 loopback
Card type : Dummy video device (0x0000)
Bus info : platform:v4l2loopback-000
Driver version: 4.9.140
Capabilities : 0x85208003
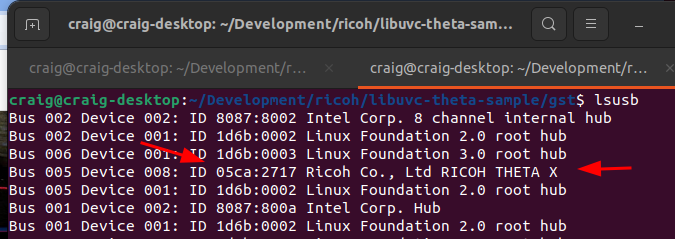
On the spot, can you see the video device with lsusb
Feel free to post more questions.
We will get you up and running!