Oh my god, the second command managed to save the file in a corrected way, 2 minutes of video for 2 minutes of recording ! thank you so much !!!
The only small problem that I have is that the quality is very bad… (with 3840 x 1920 dimension).
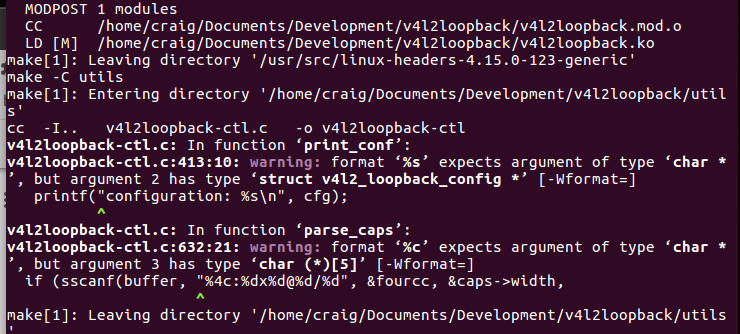
The first command line shows the streams but incorrectly (result is hugely zoomed)
Also, I am considering buying another SD card, which one do you advice me to buy if we assume that I have very good financial resources ?
Or do you think that running the jetsonNano on a hardDrive is better than an SD card ?
I’m personally using the SanDisk card below. It was recommended on a robotics site. I think you should search for “Jetson SDCard recommendation” on Google and see what comes up. I don’t know too much about SDCards, but I believe the speed of the card matters with the Jetson.
I read on the NVIDIA developer forums that it is better to use an SSD when saving video to file. However, I do not have experience with this. I suggest you try posting a question to the NVIDIA forum before you spend money on the SSD.
If you post, and if you have time, link back to this discussion thread in case other people want to experiment with the RICOH THETA.
Your Jetson Nano is acting differently from mine. Are you running JetPack 4.4 from the NVIDIA site?
It seems like there is something missing on your OS installation. Can you put the video file up on some cloud drive such as Google Drive or DropBox and then put the link to the test clip in this forum? It would be good if the clip was fairly small as my daughter is on Zoom classes all day and I have limited bandwidth. Something under 100MB would be nice.
here is a link of one stream recorded via the h264 encoding :
the problem is that it is quite a lot pixelised, which gives a bad result,
The huffman encoding otherwise generates a weired video of one second (seems to be accelerated) but with a good quality
Hello. I am trying to use my Ricoh Theta V as a webcam on my Linux computer.
One main difference of my system is that it’s on Ubuntu 16.04 .
I ran into the problem that i couldn’t run
./gst_loopback
or
gst-launch-1.0 v4l2src device=/dev/video1 ! video/x-raw,framerate=30/1
due to the following error:
libv4l2: error getting pixformat: Invalid argument
start, hit any key to stop
Error: Internal data flow error.
stop
I try to search for this error, but couldn’t find any clues. Do you have any ideas on this error?
What I’ve confirmed / did:
1.Theta V is connected on LIVE mode. (lsusb shows ID:05ca: 2712 )
2.modprobe v4l2loopback => /dev/video1 port is assigned.
3.change a line in gst_viewer.c => v4l2sink device=/dev/video1
4.gst_viewer shows the livestreaming successfully.
5.try install libv4l-dev via apt install (not sure if related or not)
I managed to live stream my theta from my PC to my phone and VR device as a 360 spherical image and even put them in VR/cardboard mode, using a webrowser.
The details are explained in the links, it works similar to skype or zoom.