Based on your profile name, I’m assuming that your firm does land surveying. As we receive sponsorship from RICOH to assist people in different use cases, I’m curious as to why you want to correct the images yourself instead of relying on the auto-level (topBottomCorrection) feature.
I’ve seen this requirement before for timelapse in both astronomy and construction. The auto-level function would make the compiled timelapse shaky.
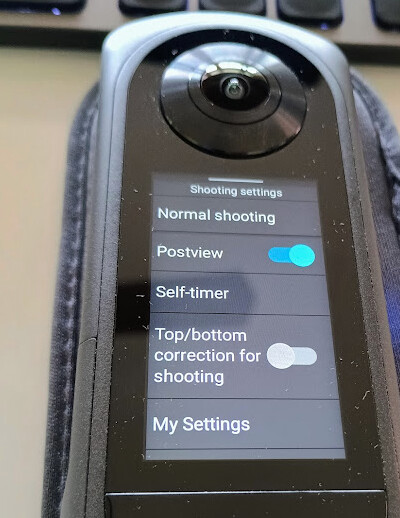
I believe the THETA X firmware was updated to allow for topBottomCorrection disabling from the UI on the body of the camera. Make sure you have the latest firmware.
I also believe the earlier versions of the THETA X firmware sometimes showed an error in topBottomCorrection, meaning that 1 out of 50 frames in a long interval might be wacky.
Prior to the firmware update for the camera body UI, you needed to use the API.
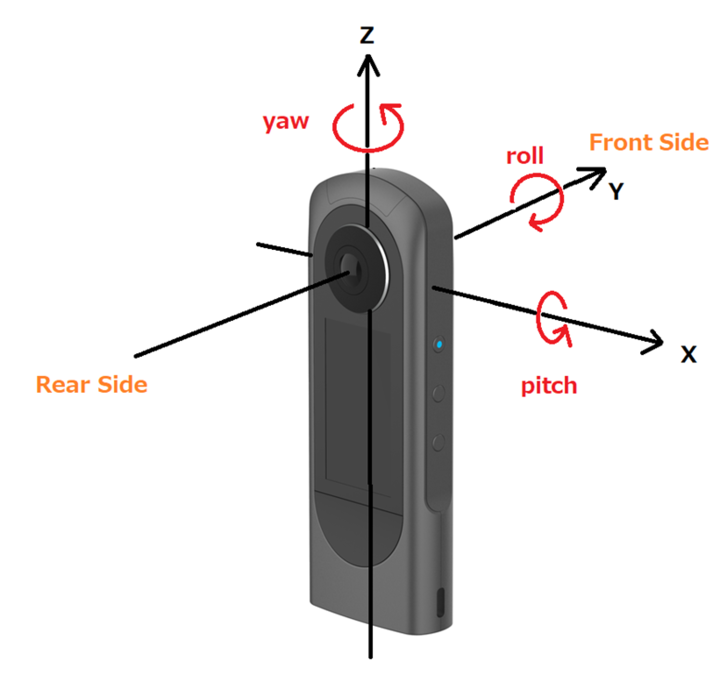
It seems that you’re also use PoseHeadingDegrees. Note that the internal compass must be calibrated (no error) for the PoseHeadingDegrees to be properly recorded in the image metadata.
See this thread:
feel free to post additional questions. Your use case is interesting for us.
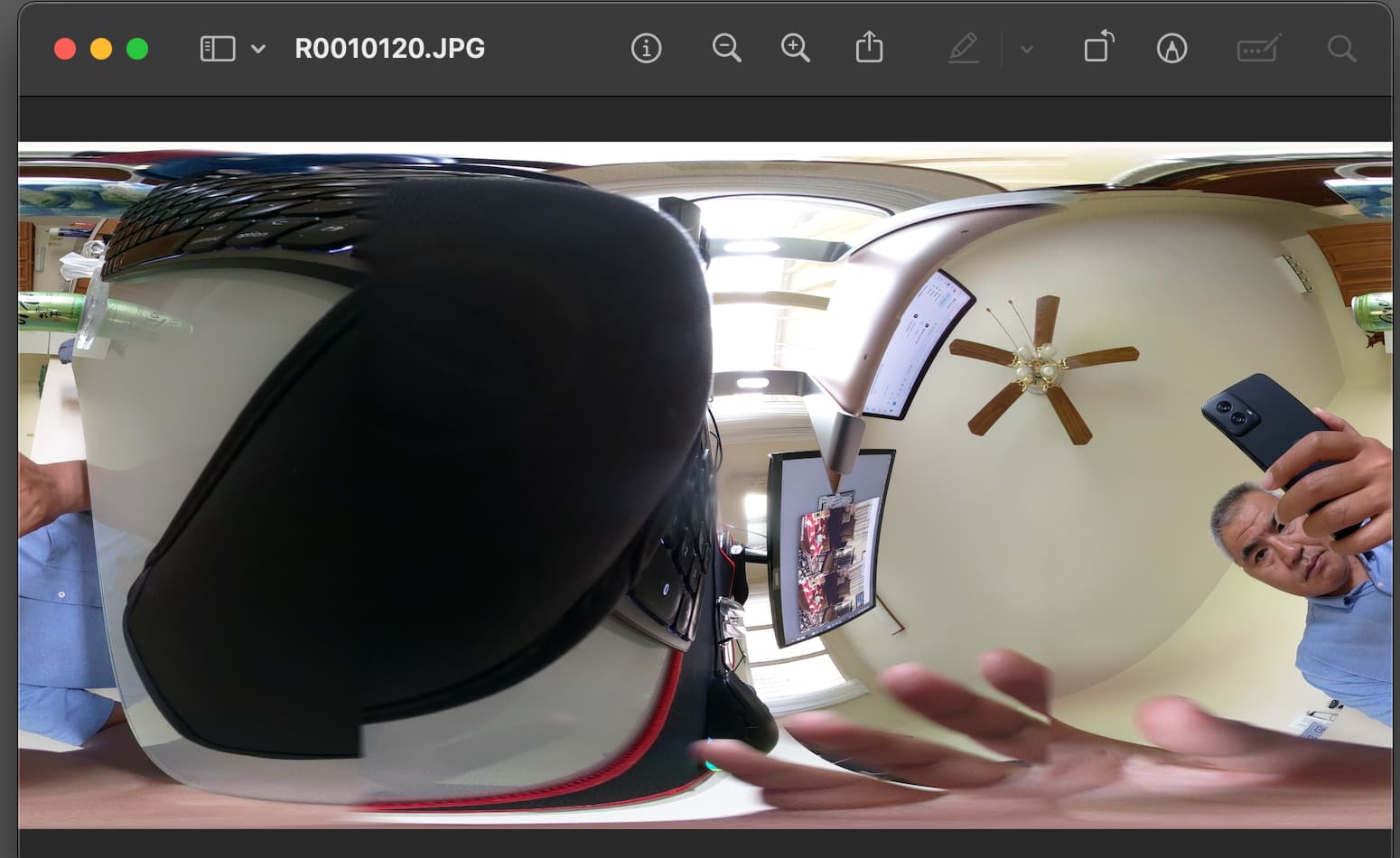
Your assumption is correct. We are currently working on a project to implement geo-referenced 360 degree images within a lidar point cloud via webpage:
The compass has been calibrated and we get PoseHeadingDegrees without issue. Ultimately, we’re using an exiftool script to pull the GPS/pitch/roll into a coordinates.txt file used by the webpage to place the objects/images.
Apparently, the camera is stuck in a reboot loop today, so we haven’t been able to try this yet but it sounds like what I was missing. Some things are easier to support remotely than others…
I’m happy to provide whatever additional info you’d like!
You can press power + wifi key for 7 seconds to force power-off if you have physical access to the camera.
If the camera is remote and you do not have physical access, please advise if the camera is connected to a computer with a USB cable or if you are getting the data from the camera using WiFi (WebAPI)
Yep - I’m told that was tried and it’s unresponsive. ‘Camera keeps stopping.’ It was connected via USB and would connect and disconnect along with the loop. I believe they’re going to RMA it…but really appreciate the help!
The camera may be in an unusable state and using RMA sounds like a good strategy IMO. Are you working with a RICOH account manager? Or, are you buying the cameras from a site such as Amazon?
Just so you know, the behavior of the Z1. If the power on the USB port is cut and then turned on again, the camera will reboot.
I don’t recommend this technique below, but if you do development regularly with multiple cameras, this might be of interest. The camera must be in developer mode (which will void the warranty) for you to be able to reboot the bootloader. Again, I don’t recommend this route, but am just sharing a technique that worked for me when the camera was bricked, with no return option.