I’ve been using Jetpack 4.6, which corresponds to L4T R32, Revision 6.1.
cat /etc/nv_tegra_release
# R32 (release), REVISION: 6.1
I recently met with a community member running L4T R32, Revision 7.1 and having problems with RICOH THETA X firmware 2.10.1.
To replicate the test with the newer version of Jetpack, I’m going first take a baseline test with Jetpack 4.6. I’ll then update this post with the install of Jetpack 4.6.4 (newest for Nano).
In this example, I’ve renamed ptpcam to theta in order to test the modified and unmodified versions of ptpcam on the same Jetson.
theta --info
THETA Device Info
==================
Model: RICOH THETA X
manufacturer: Ricoh Company, Ltd.
serial number: '14010001'
device version: 2.10.1
extension ID: 0x00000006
image formats supported: 0x00000004
extension version: 0x006e
ls
gst_loopback gst_viewer.c Makefile thetauvc.h
gst_viewer gst_viewer.o thetauvc.c thetauvc.o
craig@jetpack-4:~/Development/libuvc-theta-sample/gst$ ./gst_loopback
start, hit any key to stop
Opening in BLOCKING MODE
NvMMLiteOpen : Block : BlockType = 261
NVMEDIA: Reading vendor.tegra.display-size : status: 6
NvMMLiteBlockCreate : Block : BlockType = 261
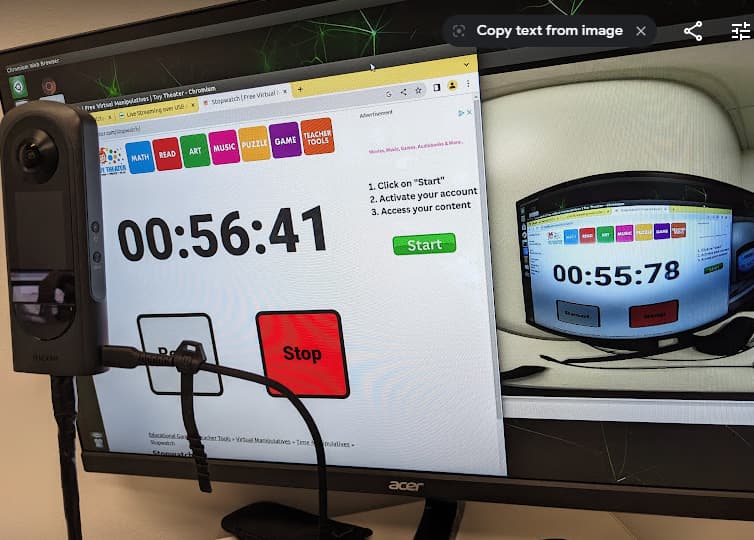
latency
At 4K, latency is 630ms.
I believe that the top/bottom correction of the live stream can be disabled with this api
This would likely reduce latency.
install jetpack
Using etcher with this file.

There appears to be another install method using the SDK manager.
SDK Manager | NVIDIA Developer
I decided to use etcher.
after upgrade
R32 release is now higher. Previous was 6.1.
cat /etc/nv_tegra_release
# R32 (release), REVISION: 7.1
/usr/local/lib seems like it will load.
/etc/ld.so.conf.d$ cat libc.conf
# libc default configuration
/usr/local/lib
from home directory
mkdir Development
cd Development/
git clone https://github.com/ricohapi/libuvc-theta.git
cd libuvc-theta/
mkdir build
cd build/
cmake ..
-- Could NOT find JPEG (missing: JPEG_LIBRARY JPEG_INCLUDE_DIR)
-- Checking for module 'libjpeg'
-- No package 'libjpeg' found
-- Looking for pthread_create in pthreads - not found
sudo apt install libjpeg-dev
sudo apt install doxygen
rerun cmake …
cmake ..
-- libusb-1.0 found using pkgconfig
-- Found JPEG: /usr/lib/aarch64-linux-gnu/libjpeg.so
-- Found JPEG library using standard module
-- Building libuvc with JPEG support.
-- Configuring done
-- Generating done
-- Build files have been written to: /home/craig/Development/libuvc-theta/build
make
sudo make install
[ 45%] Built target uvc_static
[ 90%] Built target uvc
[100%] Built target example
Install the project...
-- Install configuration: "Release"
-- Installing: /usr/local/lib/libuvc.so.0.0.6
-- Installing: /usr/local/lib/libuvc.so.0
-- Installing: /usr/local/lib/libuvc.so
-- Installing: /usr/local/include/libuvc/libuvc.h
-- Installing: /usr/local/include/libuvc/libuvc_config.h
-- Installing: /usr/local/lib/libuvc.a
-- Up-to-date: /usr/local/include/libuvc/libuvc.h
-- Up-to-date: /usr/local/include/libuvc/libuvc_config.h
-- Installing: /usr/local/lib/cmake/libuvc/libuvcTargets.cmake
-- Installing: /usr/local/lib/cmake/libuvc/libuvcTargets-release.cmake
-- Installing: /usr/local/lib/cmake/libuvc/FindLibUSB.cmake
-- Installing: /usr/local/lib/cmake/libuvc/FindJpegPkg.cmake
-- Installing: /usr/local/lib/cmake/libuvc/libuvcConfigVersion.cmake
-- Installing: /usr/local/lib/pkgconfig/libuvc.pc
-- Installing: /usr/local/lib/cmake/libuvc/libuvcConfig.cmake
use ldconfig
ldconfig -v
/usr/local/lib:
libuvc.so.0 -> libuvc.so.0.0.6
install libuvc-theta-sample
modified version
git clone https://github.com/codetricity/libuvc-theta-sample.git
overkill. install everything related to gstreamer.
sudo apt-get install libgstreamer1.0-0 gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav gstreamer1.0-doc gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-alsa gstreamer1.0-gl gstreamer1.0-gtk3 gstreamer1.0-qt5 gstreamer1.0-pulseaudio libgstreamer-plugins-base1.0-dev
modify gst_viewer.c for single camera on nano.
if (strcmp(cmd_name, "gst_loopback") == 0)
pipe_proc = "decodebin ! autovideoconvert ! "
"video/x-raw,format=I420 ! identity drop-allocation=true !"
"v4l2sink device=/dev/video0 qos=false sync=false";
make
cd gst/
make
error
./gst_viewer
works as expected
install gstthetauvc
git clone https://github.com/nickel110/gstthetauvc
Cloning into 'gstthetauvc'...
cd gstthetauvc/thetauvc
make
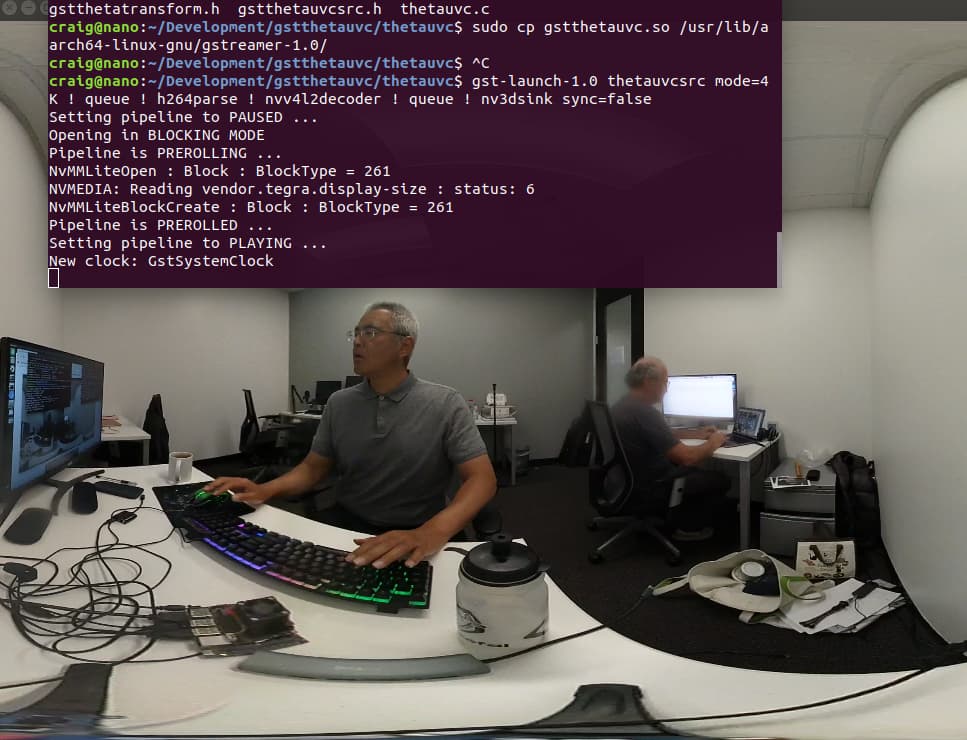
sudo cp gstthetauvc.so /usr/lib/aarch64-linux-gnu/gstreamer-1.0/
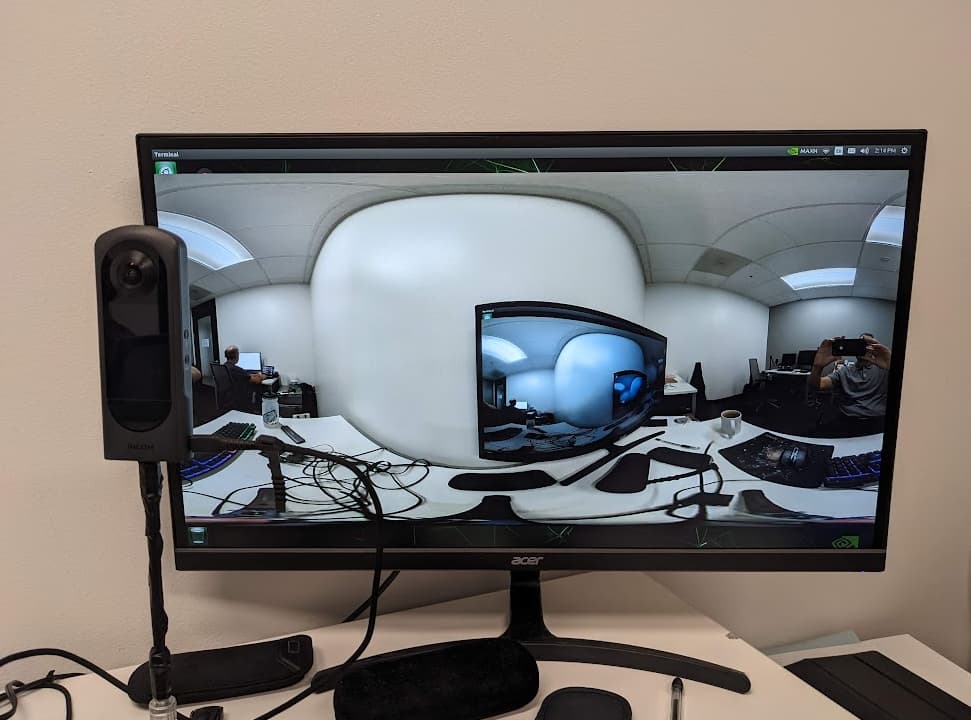
gstthetauvc test
gst-launch-1.0 thetauvcsrc mode=4K ! queue ! h264parse ! nvv4l2decoder ! queue ! nv3dsink sync=false
Setting pipeline to PAUSED ...
Opening in BLOCKING MODE
Pipeline is PREROLLING ...
NvMMLiteOpen : Block : BlockType = 261
NVMEDIA: Reading vendor.tegra.display-size : status: 6
NvMMLiteBlockCreate : Block : BlockType = 261
Pipeline is PREROLLED ...
Setting pipeline to PLAYING ...
New clock: GstSystemClock
opencv test
pip install opencv-python